Queue
 Queue class hierarchy
Queue class hierarchy
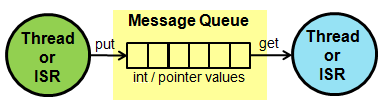
A Queue allows you to queue pointers to data from producer threads to consumer threads.
Queue class reference
| Public Member Functions | |
| Queue () | |
Create and initialize a message Queue of objects of the parameterized type T and maximum capacity specified by queue_sz. More... | |
| ~Queue () | |
| Queue destructor. More... | |
| bool | empty () const |
| Check if the queue is empty. More... | |
| bool | full () const |
| Check if the queue is full. More... | |
| uint32_t | count () const |
| Get number of queued messages in the queue. More... | |
| osStatus | put (T *data, uint32_t millisec=0, uint8_t prio=0) |
| Inserts the given element to the end of the queue. More... | |
| osEvent | get (uint32_t millisec=osWaitForever) |
| Get a message or wait for a message from the queue. More... | |
Queue example
Queue<message_t, 32> queue;
message_t *message;
queue.put(message);
osEvent evt = queue.get();
if (evt.status == osEventMessage) {
message_t *message = (message_t*)evt.value.p;
Queue and MemoryPool example
This example shows Queue and MemoryPool managing measurements.
#include "mbed.h"
typedef struct {
float voltage; /* AD result of measured voltage */
float current; /* AD result of measured current */
uint32_t counter; /* A counter value */
} message_t;
MemoryPool<message_t, 16> mpool;
Queue<message_t, 16> queue;
Thread thread;
/* Send Thread */
void send_thread (void) {
uint32_t i = 0;
while (true) {
i++; // fake data update
message_t *message = mpool.alloc();
message->voltage = (i * 0.1) * 33;
message->current = (i * 0.1) * 11;
message->counter = i;
queue.put(message);
wait(1);
}
}
int main (void) {
thread.start(callback(send_thread));
while (true) {
osEvent evt = queue.get();
if (evt.status == osEventMessage) {
message_t *message = (message_t*)evt.value.p;
printf("\nVoltage: %.2f V\n\r" , message->voltage);
printf("Current: %.2f A\n\r" , message->current);
printf("Number of cycles: %u\n\r", message->counter);
mpool.free(message);
}
}
}
Related content
- MemoryPool API reference.