mbed Robot Racing!

mbed Robot Racing is ready to go! After a few weeks of frantic designing and building, we're setup at ARM Techcon and looking forward to two days of robot action! Make sure you come and take part, as there are prizes to be won! Here is what we've setup, and how it all works...
![]()
The Racing!
Race an mbed Robot around the track as fast as possible; the fastest time wins an Android Tablet and m3pi robot!
You can race by remote control using an Archos Android Tablet, which commands the robot over bluetooth when you tilt the device! The robot racing website will time you and upload your time to the Robot Racing leader board.
The Pits!
Or you can visit "The Pits" to program the robots yourself, either to follow a set of commands, or as a line follower to follow the line around the center of the track. This is how you can squeeze out extra time, so use the Rapid Prototyping powers of mbed to knock together a quick line follower to beat all others!
For all the details, see:
How does it work?
The whole setup lets you race the mbed m3pi robot from a Android Tablet, whilst a webpage automatically times you and takes your picture as you cross the line, ready to be uploaded to the leader board!
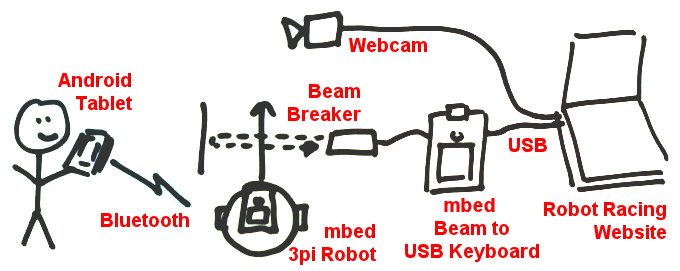
Robot Remote Control: The mbed m3pi robot has motors and line sensors, but also a Bluetooth module. This allows other things with Bluetooth to connect to it, like a mobile phone or a new Archos Android Tablet! We programmed a custom Android app that reads the accelerometer values of the tablet, and then tells the robot what to do based on those readings. So you can drive the robot by wiggling the phone!

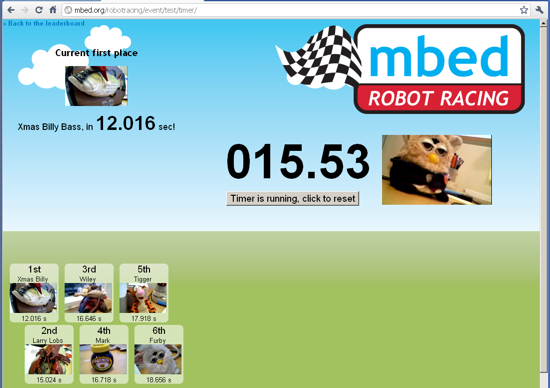
Website Timer Leaderboard: We also have a leader board website, but with some twists. This website also times you and takes your picture! A beam breaker is setup on the track, connected to another mbed. The mbed is emulating a USB keyboard, which is plugged in to the PC viewing the website. When the beam is broken, the mbed detects this and then "presses" a chosen key on the emulated keyboard. Javascript on the website is looking out for this using a onkeypress() handler, so when it sees this, it starts a big Javascript timer running. When the robot crosses the line to finish, a second key is sent and the Javascript stops the timer.
It also triggers a Flash app to take a snap from a webcam to catch a photo of you as you finish the lap! Click submit and your time and photo is entered in to the leader board:
Development
This all started some weeks ago when we started experimenting with the excellent Pololu 3pi robot, and then came up with the idea of a race. To find out more, here are some of the blog posts and resources related to putting this together:
- mbed + Pololu 3pi = fun! (Part 1)
- mbed + Pololu 3pi = fun! (Part 2)
- m3pi Robot
- m3pi Robot Development
Come and have a go!
Make sure if you visit ARM Techcon, you come and say hi and have a race! The winners get a prize, but there is also a prize draw for anyone who has taken part so there are no excuses!
And we're especially interested to have some people sit down and try and build some record breaking line followers! Come and show us your skills!
You need to log in to post a comment