Important changes to forums and questions
All forums and questions are now archived. To start a new conversation or read the latest updates go to forums.mbed.com.
Test CAN BUS with 2 nodes (transceivers), can't read the sent message
Topic last updated 24 Nov 2018, by  Zoltan Hudak.
16
replies
Zoltan Hudak.
16
replies
Zoltan Hudak.
16
replies




{kind=link}
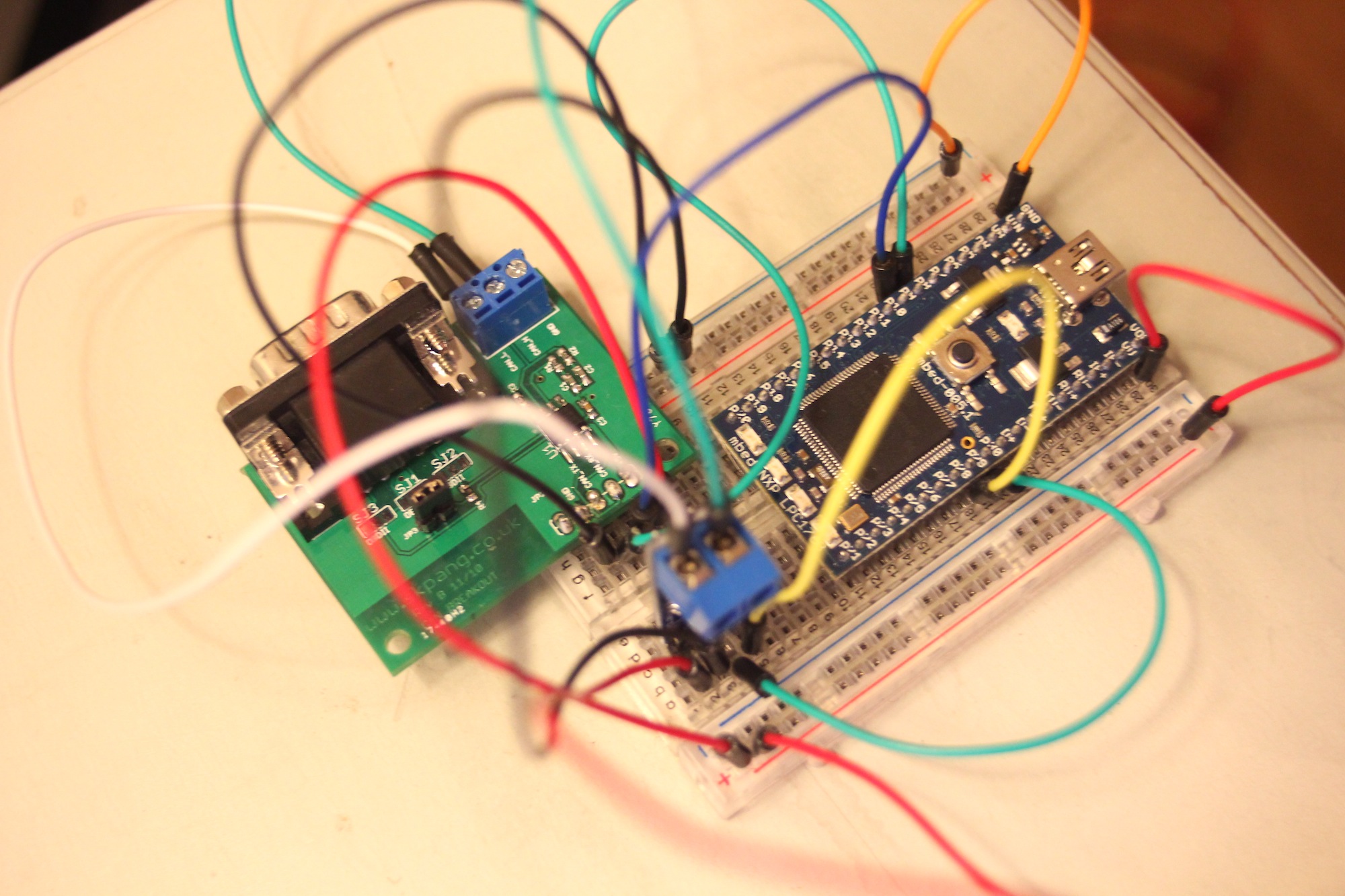
I am using mbed with two different CAN transceivers:
(Schematics are in the footer of this post)
with the following wiring:
http://mbed.org/media/uploads/kaspars/2-can-wiring.jpg
and from another view:
http://mbed.org/media/uploads/kaspars/wiring-top.jpg
I am running the CAN loopback example provided in the Handbook: http://mbed.org/handbook/CAN but it never receives the message. I also tried to modify the code in order to see rderror() and tderror() for both can1 and can2 and got the following reading via USB serial:
with the following code:
Import programCAN-node-loop
Testing CAN network with two nodes in loopback
Last commit 07 Jan 2013 by Kaspars D
Kaspars D
Questions
What do the tderrors mean?
Things I have already tried