Important changes to forums and questions
All forums and questions are now archived. To start a new conversation or read the latest updates go to forums.mbed.com.
Reading a high-speed serial stream
Topic last updated 26 Jan 2011, by  Gary Johnson.
21
replies
Gary Johnson.
21
replies
Gary Johnson.
21
replies



Hello mbed community,
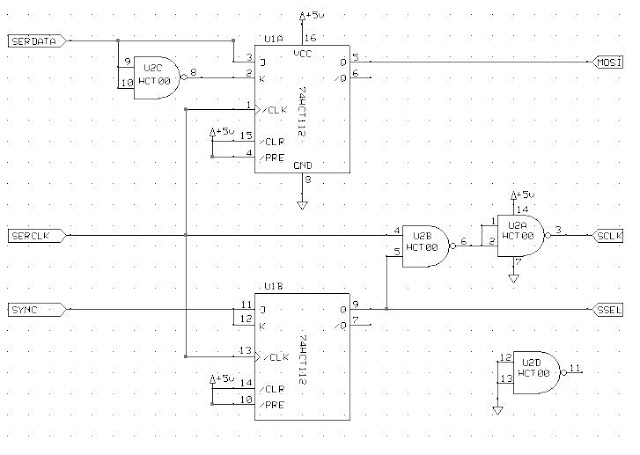
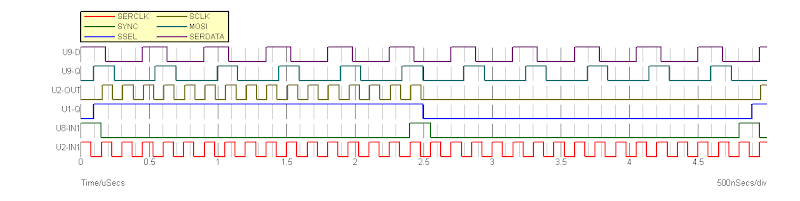
I have to read a GPS front-end output with my mbed. This is serial stream of bits running at 6.5MHz (see below)
Basically it can be considered as a 1-bit ADC with two outputs (clock and data): the clock runs at 6.5MHz and the data is 1bit wide. I have been reading a bit about mbed and so far my candidates buses are SPI (SSP) and I2S. I have some doubts about both though.. namely the SPI likes framing and the I2S is usually used at much lower speeds.
I just tried the SPISlave library so far,
connecting p11 (MOSI) to the data line, p13 (SCK) to the clock, and shorting a mbed DigitalOut pin with the "chip select" of the SPISlave on p14:
but this code
// // GET THE DATA SNAPSHOT FROM THE GPS FRONT-END // // Disable the reception of data from ADC for the moment mbedCS = 1; spiGpsAdc.format(8,1); //spiGpsAdc.frequency(6500000); // FIXME Should I set the clock here? mbed should be slave.. ptMem = (unsigned char*) malloc(16*1024); if (NULL != ptMem) { // Write in memory, probably need DMA later? myled2 = 1; k = 0; spiGpsAdc.reply(0x96); // Prime SPI with first reply mbedCS = 0; while (k < (16*1024)) { if(spiGpsAdc.receive()) { ptMem[k] = spiGpsAdc.read(); // Read byte from master k++; } } mbedCS = 1; myled2 = 0; }never exits the loop.
Could someone shed some light?
Regards,
Michele