Mutex
 Mutex class hierarchy
Mutex class hierarchy
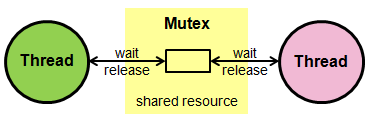
A Mutex is used to synchronize the execution of threads, for example to protect the access to a shared resource.
The Mutex methods cannot be called from interrupt service routines (ISR). In the current version of Mbed OS, if you attempt to use a mutex from within an ISR, it will treat that as a fatal system error, and you will see an error like this:
++ MbedOS Error Info ++
Error Status: 0x80020115 Code: 277 Module: 2
Error Message: Mutex lock failed
Location: 0x80026B3
Error Value: 0xFFFFFFFA
Current Thread: Id: 0x20004F54 Entry: 0x8002ABF StackSize: 0x1000 StackMem: 0x20004F98 SP: 0x2004FEF8
For more info, visit: https://armmbed.github.io/mbedos-error/?error=0x80020115
-- MbedOS Error Info --
If synchronization is required in ISR, consider using semaphores.
Note: Mbed OS uses the PlatformMutex class instead of the RTOS mutex for all drivers.
Mutex class reference
| Public Member Functions | |
| Mutex () | |
| Create and Initialize a Mutex object. More... | |
| Mutex (const char *name) | |
| Create and Initialize a Mutex object. More... | |
| void | lock () |
| Wait until a Mutex becomes available. More... | |
| bool | trylock () |
| Try to lock the mutex, and return immediately. More... | |
| bool | trylock_for (uint32_t millisec) |
| Try to lock the mutex for a specified time. More... | |
| bool | trylock_for (Kernel::Clock::duration_u32 rel_time) |
| Try to lock the mutex for a specified time. More... | |
| bool | trylock_until (uint64_t millisec) |
| Try to lock the mutex until specified time. More... | |
| bool | trylock_until (Kernel::Clock::time_point abs_time) |
| Try to lock the mutex until specified time. More... | |
| void | unlock () |
| Unlock the mutex that has previously been locked by the same thread. More... | |
| osThreadId_t | get_owner () |
| Get the owner the this mutex. More... | |
| ~Mutex () | |
| Mutex destructor. More... | |
Mutex example
Use Mutex to protect printf().
/*
* Copyright (c) 2020 Arm Limited and affiliates.
* SPDX-License-Identifier: Apache-2.0
*/
#include "mbed.h"
Mutex stdio_mutex;
Thread t2;
Thread t3;
void notify(const char *name, int state)
{
stdio_mutex.lock();
printf("%s: %d\n\r", name, state);
stdio_mutex.unlock();
}
void test_thread(void const *args)
{
while (true) {
notify((const char *)args, 0);
ThisThread::sleep_for(1000);
notify((const char *)args, 1);
ThisThread::sleep_for(1000);
}
}
int main()
{
t2.start(callback(test_thread, (void *)"Th 2"));
t3.start(callback(test_thread, (void *)"Th 3"));
test_thread((void *)"Th 1");
}
Note: C standard library Mutexes
The Arm C standard library already has Mutexes in place to protect the access to stdio, so on the LPC1768 the above example is not necessary. On the other hand, the LPC11U24 does not provide default stdio Mutexes, making the above example a necessity.
Note: Because of the mutexes in the Arm C standard library, you cannot use stdio (printf, putc, getc and so on), malloc and new in ISR.
Related content
- PlatformMutex API reference.