Drone / MultiCopter - ドローン
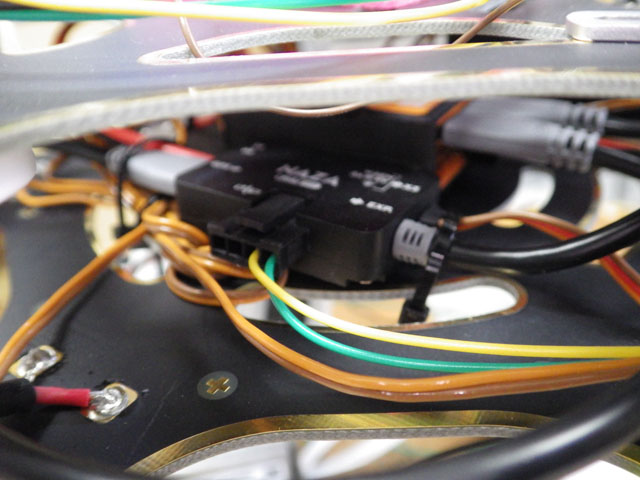
DJI NAZA コントローラー


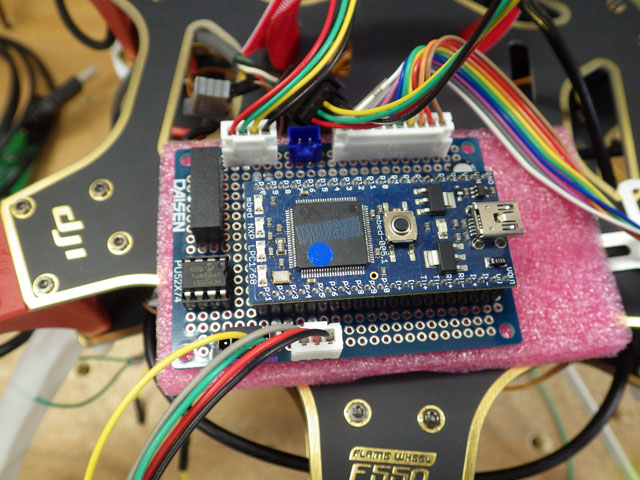
DJI社のフライトコントローラーNAZAシリーズを S.Bus経由でコントロールし、 同時にCANバスからGPSや電子コンパスのデータを得ることができます。
mbedで、ラジコン・プロポを置き換えて働かせることができます。
GPSにより、自動航行も可能になるでしょう。
また、電波をロストしてもフェイルセーフモードに入らない信号を作りだすこともできます。
DJI ファントム シリーズも同様にコントロールできるでしょう。
| mbed | NAZA | |
|---|---|---|
| p28 UART TXD | ---7S04--> | X2 S.Bus |
| p29 CAN TX | ---MCP2551--> | CAN |
| p30 CAN RX | <--MCP2551--- | CAN |
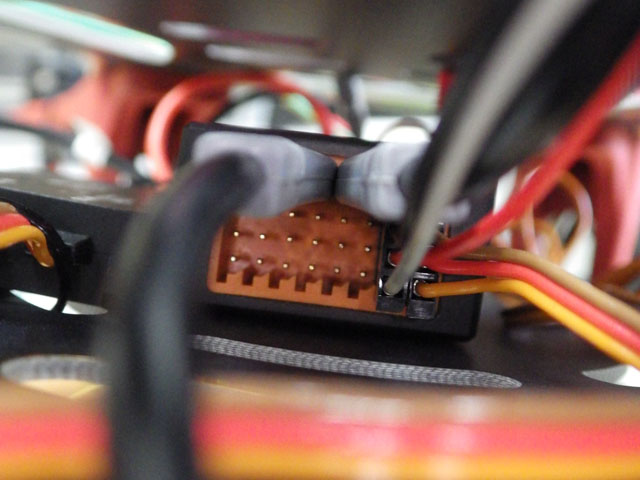
X2 S.Bus (Naza-M)
コネクタ:QI-3K
| 1 | GND |
|---|---|
| 2 | +5V |
| 3 | signal |
Import libraryFutabaSBUS
Library decoding Futaba SBUS data and control SBUS Servos. Hint! The TTL signal from the Futaba SBUS receiver / the TTL signal to the SBUS servos must be inverted. Use some 3.3V compatibel TTL logic chip such as 74LVT04 etc.
Last commit 09 Feb 2012 by  Uwe Gartmann
Uwe Gartmann
| チャンネル | 1 | 2 | 3 | 4 | 5 | 6 | 7 | Flags |
|---|---|---|---|---|---|---|---|---|
| 信号 | Aileron | Elevator | Throttle | Rudder | X1 | X2 | Mode | Failsafe |
純正コントローラーを解析されたデータ http://saltylab.jp/?cat=14
CAN (Naza PMU)
コネクタ:Molex Micro-Fit 3.0
| 4 | 3 | 2 | 1 |
|---|---|---|---|
| +6V | GND | CAN H | CAN L |
CANデータを解析されたデータ http://www.rcgroups.com/forums/showthread.php?t=2071772
| Message ID | 0x07f8 | 0x0118 |
|---|---|---|
| データ | GPS | Compass |
センサー
CT電流センサー(U_RD HCS-10-50APCLS)を搭載。 ADCでバッテリーの電流・電圧を計測します。
無線
NEC 920MHz
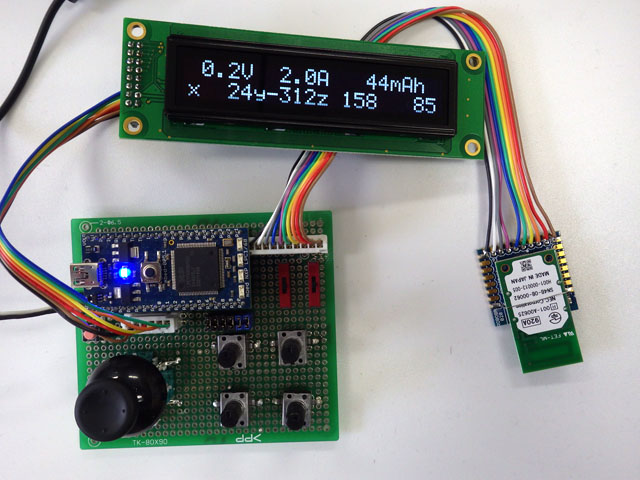
コントローラーの信号を送信します。
GPS座標、電圧、電流などをフィードバックします。
920MHzは特定小電力のためデータレートが遅いので、アップリンク用・ダウンリンク用に2セットの無線モジュールを用意した。
Program
Import programDrone_air
DJI NAZA-M controller (multi copter side) see: https://developer.mbed.org/users/okini3939/notebook/drone/
Last commit 19 May 2016 by Suga koubou
Import programDrone_ground
DJI NAZA-M controller (remote controller side) see: https://developer.mbed.org/users/okini3939/notebook/drone/
Last commit 19 May 2016 by Suga koubou
test
Import programDjiNaza
DJI NAZA Controller (Phantom, Futaba S.Bus, CAN bus) see: https://developer.mbed.org/users/okini3939/notebook/drone/
Last commit 08 Feb 2016 by Suga koubou
メモ
- 電流は、ホバリング時の実測 約22A。(Li-Po 4セル、14.8V)
- 6ローターで、ペイロード2kgくらいは上がりそう。
- 墜落してもプロペラは意外と丈夫。
Please log in to post comments.