PROCESADORES - 2016-03. TAREA 2. PID+IrDA
Dependencies: Pulse1 TextLCD mbed
Fork of
PID_ENCODER_OK
by  Gustavo Ramirez
Gustavo Ramirez
Tarea 2: IRDA + PID
PROCESADORES - 2016-03
Por:
- Jaime Alonso Osorio Palacio
- David Fuertes Chaguezac
- Wilson Anibal Ortega Andrade
- John Wilmer Ruiz López
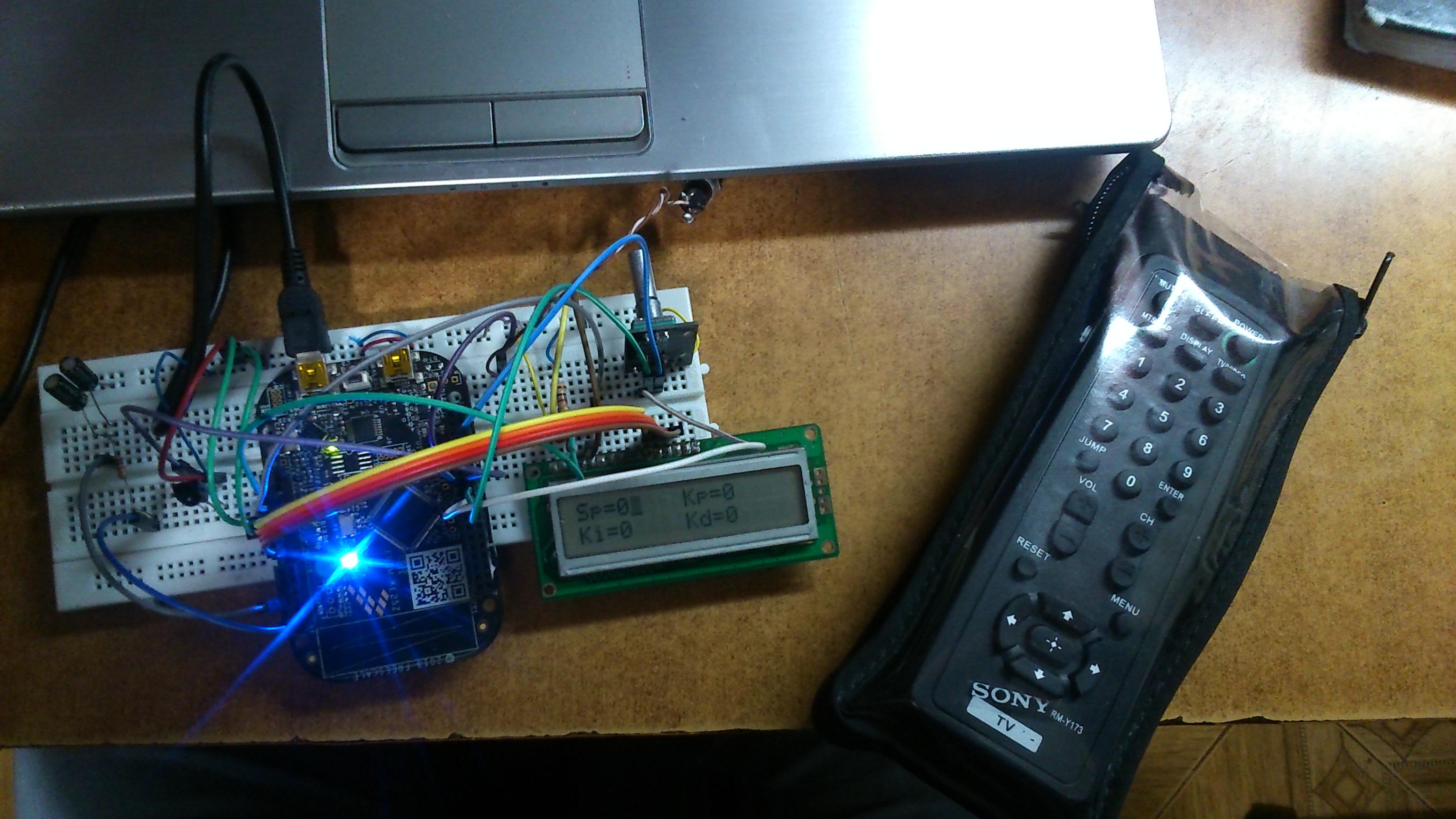
A partir del código de PID+ENCODER: https://developer.mbed.org/users/tony63/code/PID_ENCODER_OK/ , se adiciona un sensor IrDA (Infrared Data Association) para programar a través de este los parámetros del PID (spnum, kp, ki y kd) en la FRDM-KL25Z. Observar todos estos datos y configuraciones en una LCD. Posee depuración via USB en una terminal (se usó Termite 3.2.) para conocer los estados en los que se encuentra el programa y verificar los datos.
IMÁGENES:
main.cpp
- Committer:
- jaosoriop
- Date:
- 2016-11-23
- Revision:
- 2:fe2c4b1f132f
- Parent:
- 1:058b8f5c135d
File content as of revision 2:fe2c4b1f132f:
/*
PROCESADORES - 2016-03
TAREA 2.
A partir del código de PID+TECLADO, utilizar un sensor IRDA para programar los
parámetros del PID (spnum, kp, ki y kd) en la FRDM-KL25Z. Observar todos estos
datos y configuraciones en una LCD
PRESENTADO POR:
Jaime Alonso Osorio Palacio
David Fuertes Chaguezac
Wilson Anibal Ortega Andrade
John Wilmer Ruiz López
*/
#include "mbed.h"
#include "TextLCD.h" // LCD
#include <Pulse1.h>
#include "math.h"
#include "stdio.h" //printf, etc
#include "string.h"
#include "stdlib.h" // atoi
#include "stdint.h"
#include <assert.h>
//****************** CONFIGURACIÓN DE PUERTOS DE COMUNICACIÓN ******************
PulseInOut irda(PTD0);// en este puerto se pone el sensor infrarrojo
Serial pc(USBTX, USBRX); //configuro puerto serial
TextLCD lcd(PTB10, PTB11, PTE2, PTE3, PTE4, PTE5); // rs, e, d4-d7
AnalogIn y(PTB3);//entrada analoga
AnalogOut u(PTE30);//salida analoga OJO solo se le pueden drenar 1.5mA en circuitos use un Buffer
//si se ignora esto se arruina la FRDMKL25Z
DigitalOut led1(LED1);
DigitalOut led2(LED2);
DigitalOut led3(LED3);
//********************************* PARÁMETROS *********************************
//codigos movimiento del cursor
//int C1=0x0E; // solo muestra el curzor
int C2=0x18; // desplaza izquierda
int C3=0x1A; // desplaza derecha
int C4=0x0C; // quito cursor bajo
int C1=0x0F;
int cambio=0, diferencia=0;
float pid,o,ai,ad,ap,med,err;
float err_v;
int spnum=0,kinum=0,kpnum=0,kdnum=0,pos=1;
int i=0,ii=0;
int numero;
char tecla1[1], tecla2[1],tecla3[1];
int valor1=0, valor2=0, valor3=0;
int valornum=0;
int flag1=0, flag2=0, flag3=0;
int conteo=0;
//****************************** DATOS CONTROL IR ******************************
const int head_H = 2880; //+20% medida con osciloscopio en microsegundos
const int head_L = 1920; //-20% medida con osciloscopio
const int T_alto=567; //ponga su tiempo de la prueba
const int T_bajo=1170; //ponga su tiempo de la prueba
const int num_bits = 21; //ponga su numero de bits
int header =0; //tiempo de cabecera pulso abajo
int num[num_bits]; //cadena para almacenar todos los tiempos que conforman los bits de datos
int aux[21]; //variable donde se concatenarán la trama de "bits"
int binM[20]; // arreglo para dar valor a cada bit en decimal
int dato; //tiempo de cada dato que se lee
// DATOS DE PRUEBA CONTROL SONY RM-Y173 (SIRVE PARA SONY TRINITRON KV-21ME42/8)
int uno=4224; int UNO[] ={0,0,0,0,0,0,0,1,0,0,0,0,1,0,0,0,0,0,0,0};
int dos=12417; int DOS[] ={1,0,0,0,0,0,0,1,0,0,0,0,1,1,0,0,0,0,0,0};
int tres=20610; int TRES[] ={0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
int cuatro=28803; int CUATRO[]={0,1,0,0,0,0,0,1,0,0,0,0,1,0,1,0,0,0,0,0};
int cinco=36996; int CINCO[] ={0,0,1,0,0,0,0,1,0,0,0,0,1,0,0,1,0,0,0,0};
int seis=45189; int SEIS[] ={1,0,1,0,0,0,0,1,0,0,0,0,1,1,0,1,0,0,0,0};
int siete=53382; int SIETE[] ={0,1,1,0,0,0,0,1,0,0,0,0,1,0,1,1,0,0,0,0};
int ocho=61575; int OCHO[] ={1,1,1,0,0,0,0,1,0,0,0,0,1,1,1,1,0,0,0,0};
int nueve=69768; int NUEVE[] ={0,0,0,1,0,0,0,1,0,0,0,0,1,0,0,0,1,0,0,0};
int cero=77961; int CERO[] ={1,0,0,1,0,0,0,1,0,0,0,0,1,1,0,0,1,0,0,0};
int power=176277; int POWER[] ={1,0,1,0,1,0,0,1,0,0,0,0,1,1,0,1,0,1,0,0};
int enter=94347; int ENTER[] ={1,1,0,1,0,0,0,1,0,0,0,0,1,1,1,0,1,0,0,0};
//******************************************************************************
//******************************* CICLO PRINCIPAL ******************************
//******************************************************************************
int main(){
lcd.locate(0,1);
lcd.printf("**Control PID**");
wait(2);
lcd.cls(); // Borrar Pantalla
lcd.writeCommand(C1);//escribimos un comando segun el manual del modulo LCD
lcd.locate(8,0); // necesariamente (columna, fila)
lcd.printf("Kp=%d",kpnum);
lcd.locate(0,1);
lcd.printf("Ki=%d",kinum);
lcd.locate(8,1);
lcd.printf("Kd=%d",kdnum);
lcd.locate(0,0);
lcd.printf("Sp=%d",spnum);
binM[0]=1; // se crea un arreglo con los valores de cada bit en decimal
for(i=1;i<(num_bits-1);++i){
binM[i]=binM[i-1]*2; } // printf("%i",aux[i]);
while(1) {
diferencia=0, conteo=0; valor1=0, valor2=0, valor3=0;
char valor[10] = {0}; strcpy(tecla1, ""); strcpy(tecla2, ""); strcpy(tecla3, "");
ini1:
int header=0;
led2=1;
led1=1;
header = irda.read_low_us(); //funcion para leer un pulso de caida o bajo
if (header > head_L && header < head_H) goto seguir1;//verificar que este en la tolerancia +-20%
else goto ini1;
seguir1:
wait_us(333); //duración aproximada de tiempo muerto antes de comenzar la trama
led2=0; //enciendo un LED para indicar que pasó el header y ya se van a recibir datos
for(i=0;i<(num_bits-1);++i){ // POR OSCILOSCOPIO se determina que llegan (num_bits),datos
dato = irda.read_low_us(); //leer un bit de datos que es pulso bajo en este control
num[i]=dato; //guarda cada dato en el arreglo num
wait_us(333);
}
/*
wait(0.1); //espero un poquito antes de leer todo el arreglo y ponerlo en pantalla
pc.printf("Duracion de cabecera = %d\n", header);
pc.printf("Duracion de cada bit de llegada=");
for(i=0;i<(num_bits-1);++i){
pc.printf("%d,",num[i]);
}
wait(0.1); //espero e imprimo en binario
pc.printf("\n");
pc.printf("En binario =");
*/
for(i=0;i<(num_bits-1);++i){
if(num[i] > ((T_alto+T_bajo)/2)){
pc.printf("1");
aux[i]=1;
}
else{
pc.printf("0");
aux[i]=0;
}
}
// strcpy(tecla, "");
// printf("\t\t\t Tecla presionada: %s\n",tecla);
// convierto a decimal la tecla presionada
numero=0;
for(i=0;i<(num_bits-1);++i){
numero=numero+(binM[i]*aux[i]);
}
// printf("\n");
// printf("Convertido a decimal=%d \n",numero);
if (numero==uno) {strcpy(tecla1, "1");}
else if (numero==dos) {strcpy(tecla1, "2");}
else if (numero==tres) {strcpy(tecla1, "3");}
else if (numero==cuatro){strcpy(tecla1, "4");}
else if (numero==cinco) {strcpy(tecla1, "5");}
else if (numero==seis) {strcpy(tecla1, "6");}
else if (numero==siete) {strcpy(tecla1, "7");}
else if (numero==ocho) {strcpy(tecla1, "8");}
else if (numero==nueve) {strcpy(tecla1, "9");}
else if (numero==cero) {strcpy(tecla1, "0");}
else if (numero==power) {strcpy(tecla1, "P");}
else if (numero==enter) {strcpy(tecla1, "E");}
else {goto ini1;}
pc.printf("\t\t\t Tecla presionada: %s\n",tecla1);
valor1=100*atoi(tecla1);
CONTEO:
conteo++;
if (conteo == 1) {
if (strcmp(tecla1, "P")!=0){
if (strcmp(tecla1, "E")!=0){
// strcpy(valor,tecla1);
pc.printf("VALOR en conteo=1 es %s \n",valor);
ini2: header=0; led2=1; led1=1;
header = irda.read_low_us(); //funcion para leer un pulso de caida o bajo
if (header > head_L && header < head_H) goto seguir2;//verificar que este en la tolerancia +-20%
else goto ini2;
seguir2: wait_us(333); //duración aproximada de tiempo muerto antes de comenzar la trama
led2=0; //enciendo un LED para indicar que pasó el header y ya se van a recibir datos
for(i=0;i<(num_bits-1);++i){ // POR OSCILOSCOPIO se determina que llegan (num_bits),datos
dato = irda.read_low_us(); //leer un bit de datos que es pulso bajo en este control
num[i]=dato; //guarda cada dato en el arreglo num
wait_us(333);
}
for(i=0;i<(num_bits-1);++i){
if(num[i] > ((T_alto+T_bajo)/2)){
pc.printf("1");
aux[i]=1;
}
else{
pc.printf("0");
aux[i]=0;
}
}
// convierto a decimal la tecla presionada
numero=0;
for(i=0;i<(num_bits-1);++i){
numero=numero+(binM[i]*aux[i]);
}
// printf("\n");
// printf("Convertido a decimal=%d \n",numero);
if (numero==uno) {strcpy(tecla2, "1");}
else if (numero==dos) {strcpy(tecla2, "2");}
else if (numero==tres) {strcpy(tecla2, "3");}
else if (numero==cuatro){strcpy(tecla2, "4");}
else if (numero==cinco) {strcpy(tecla2, "5");}
else if (numero==seis) {strcpy(tecla2, "6");}
else if (numero==siete) {strcpy(tecla2, "7");}
else if (numero==ocho) {strcpy(tecla2, "8");}
else if (numero==nueve) {strcpy(tecla2, "9");}
else if (numero==cero) {strcpy(tecla2, "0");}
else if (numero==power) {strcpy(tecla2, "P");}
else if (numero==enter) {strcpy(tecla2, "E");}
else {goto ini2;}
pc.printf("\t\t\t Tecla presionada: %s\n",tecla2);
valor2=10*atoi(tecla2);
goto CONTEO;
} //if (strcmp(tecla1, "E")!=0){
else if(strcmp(tecla1, "E")==0){
{diferencia = valor1; goto siguiente;}
}
} //if (strcmp(tecla1, "P")!=0){
} //if (conteo == 1) {
////////////////////////////////////////////////////////////////////////////////
if (conteo == 2) {
if (strcmp(tecla2, "P")!=0){
if (strcmp(tecla2, "E")!=0){
// strcpy(valor,tecla2);
ini3: header=0; led2=1; led1=1;
header = irda.read_low_us(); //funcion para leer un pulso de caida o bajo
if (header > head_L && header < head_H) goto seguir3;//verificar que este en la tolerancia +-20%
else goto ini3;
seguir3: wait_us(333); //duración aproximada de tiempo muerto antes de comenzar la trama
led2=0; //enciendo un LED para indicar que pasó el header y ya se van a recibir datos
for(i=0;i<(num_bits-1);++i){ // POR OSCILOSCOPIO se determina que llegan (num_bits),datos
dato = irda.read_low_us(); //leer un bit de datos que es pulso bajo en este control
num[i]=dato; //guarda cada dato en el arreglo num
wait_us(333);
}
for(i=0;i<(num_bits-1);++i){
if(num[i] > ((T_alto+T_bajo)/2)){
pc.printf("1");
aux[i]=1;
}
else{
pc.printf("0");
aux[i]=0;
}
}
// convierto a decimal la tecla presionada
numero=0;
for(i=0;i<(num_bits-1);++i){
numero=numero+(binM[i]*aux[i]);
}
// printf("\n");
// printf("Convertido a decimal=%d \n",numero);
if (numero==uno) {strcpy(tecla3, "1");}
else if (numero==dos) {strcpy(tecla3, "2");}
else if (numero==tres) {strcpy(tecla3, "3");}
else if (numero==cuatro){strcpy(tecla3, "4");}
else if (numero==cinco) {strcpy(tecla3, "5");}
else if (numero==seis) {strcpy(tecla3, "6");}
else if (numero==siete) {strcpy(tecla3, "7");}
else if (numero==ocho) {strcpy(tecla3, "8");}
else if (numero==nueve) {strcpy(tecla3, "9");}
else if (numero==cero) {strcpy(tecla3, "0");}
else if (numero==power) {strcpy(tecla3, "P");}
else if (numero==enter) {strcpy(tecla3, "E");}
else {goto ini3;}
pc.printf("\t\t\t Tecla presionada: %s\n",tecla3);
valor3=1*atoi(tecla3);
goto CONTEO;
} //if (strcmp(tecla2, "E")!=0){
else if(strcmp(tecla2, "E")==0){
{goto siguiente;}
}
} //if (strcmp(tecla1, "P")!=0){
} //if (conteo == 1) {
////////////////////////////////////////////////////////////////////////////////
if (conteo == 3){
goto siguiente;
}
siguiente:
// diferencia=encoder.getPulses()-cambio;
// cambio=encoder.getPulses();
diferencia=valor1+valor2+valor3;
if (strcmp(tecla1, "P")==0)
{
pc.printf("Comienza el PID por presionar POWER");
break; // si se presiona el botón POWER se sale de la configuración y comienza el PID
}
if (diferencia==0)
{
//nada
}
else if(diferencia>0)
{
if(pos==1)
{
if(diferencia>=999)
{
spnum=999;
lcd.locate(3,0);
lcd.printf(" ");
lcd.locate(3,0);
lcd.printf("%d", spnum);
}
else
{
spnum=diferencia;
lcd.locate(3,0);
lcd.printf("%d", spnum);
}
} //else if(pos==1)
else if(pos==2)
{
if(diferencia>=999)
{
kpnum=999;
lcd.locate(11,0);
lcd.printf(" ");
lcd.locate(11,0);
lcd.printf("%d", kpnum);
}
else
{
kpnum=diferencia;
lcd.locate(11,0);
lcd.printf("%d", kpnum);
}
} //else if(pos==2)
else if(pos==3)
{
if(diferencia>=999)
{
kinum=999;
lcd.locate(3,1);
lcd.printf(" ");
lcd.locate(3,1);
lcd.printf("%d", kinum);
}
else
{
kinum=diferencia;
lcd.locate(3,1);
lcd.printf("%d", kinum);
}
} //else if(pos==3)
else if(pos==4)
{
if(diferencia>=999)
{
kdnum=999;
lcd.locate(11,1);
lcd.printf(" ");
lcd.locate(11,1);
lcd.printf("%d", kdnum);
}
else
{
kdnum=diferencia;
lcd.locate(11,1);
lcd.printf("%d", kdnum);
}
} //else if(pos==4)
} // else if(diferencia>0)
if (strcmp(tecla1, "E")==0) //cambia la posicion de ingreso de parametros si se presiona en botón ENTER
{
pc.printf("Cambio de posicion por presionar ENTER");
led3 =!led3;
if(pos==4)
{
pos=1;
lcd.locate(3,0);
lcd.printf("%d", spnum);
}
else if (pos==1)
{
pos++;
lcd.locate(11,0);
lcd.printf("%d", kpnum);
}
else if(pos==2)
{
pos++;
lcd.locate(3,1);
lcd.printf("%d", kinum);
}
else if(pos==3)
{
pos++;
lcd.locate(11,1);
lcd.printf("%d", kdnum);
}
wait(0.25);
} //if (strcpy(tecla, "E")==0)
wait(0.1);
}
//Transicion
lcd.writeCommand(C4);//escribimos un comando segun el manual del modulo LCD para quitar cursor bajo
lcd.cls(); //borra la pantalla
lcd.printf(" GUARDADOS!");
wait(1);
lcd.cls();
lcd.printf(" INICIA EL PID");
wait(1);
// se imprimen los parches del control *****************************************
lcd.cls();
lcd.printf("Er=%3.0f",err);
lcd.locate(8,0);
lcd.printf("Me=%3.0f",med);
lcd.locate(0,1);
lcd.printf("Sp=%3.0f",spnum);
lcd.locate(8,1);
lcd.printf("Co=%3.0f",pid);
wait(1);
// CICLO PRINCIPAL CONTROLADOR PID
lop1: med = y.read()*999;
err = (spnum-med); //se calcula el error
ap = kpnum*err*0.01f; //se calcula la accion proporcinal
ai =(kinum*err*0.01f)+ai; //calculo de la integral del error
ad = kdnum*(err-err_v)*0.01f; //calculo de la accion derivativa
pid = (ap+ai+ad);
// se verifica que pid sea positivo **************************************
if(pid<=0) {
pid=0; }
// se verifica que pid sea menor o igual la valor maximo *****************
if (pid > 999) {
pid=999; }
//se muestran las variables******************************************
lcd.locate(3,0); lcd.printf(" ");
lcd.locate(3,0); lcd.printf("%3.0f",err);
lcd.locate(11,0); lcd.printf(" ");
lcd.locate(11,0); lcd.printf("%3.0f",med);
lcd.locate(3,1); lcd.printf(" ");
lcd.locate(3,1); lcd.printf("%d",spnum);
lcd.locate(11,1); lcd.printf(" ");
lcd.locate(11,1); lcd.printf("%3.0f",pid);
//Normalizacion de la salida
// se actualizan las variables *******************************************
err_v = err;
o = pid/999;
u.write(o); // se envia el valor pid a puerto analogico de salida (D/A) **************
// se repite el ciclo
wait_ms(300);
goto lop1;
}