QRdrone(mbed_quadcopter) building log
 Ryo Nakabayashi.
2
replies
Ryo Nakabayashi.
2
replies
10/1
クアッドコプターフレームキット到着、組み立て


だいたい端から端までで550mm。後日詳細な寸法は測定する予定。
10/15
xbee関連テスト。
- ループバックテストは成功
- 設定にちょっと戸惑った(X-CTU)
- トランジスタ技術増刊のxbee特集が分かりやすかった。
- mbed に Serial で繋げて PC-mbed 間の無線通信もできた。
- Xbee自体の入出力端子は不使用、PC-mbed間のみの通信の予定なので、APIモードは使用せず、ATモードだけで動作させる。
10/16
6軸IMU(慣性計測装置)到着。とても小さい


10/18
超音波センサを mbed につないで距離を読み取るテストと、Nokiaの液晶モジュールで遊んだ。 超音波センサからの読み取りは RangeFinder ライブラリ(上参照)ですぐ出来た。3cm400cmの範囲で読み取れる。かなり正確に出る。



超音波センサで読み取った物体までの距離を、Nokiaの液晶に表示し、xbeeでpcに送っている様子。
超音波センサ
- mbed
- xbee
- Nokia LCD
数字を出すだけでは味気ないと思ったので、メーター風なものを作ってみた。
Import programUltrasonic_sensor_circle_ui
get distance from ultrasonic sensor and print it with circle_UI on Nokia LCD
Last commit 18 Oct 2012 by Ryo Nakabayashi
距離が円形に出ます。メジャーみたいに。
10/27
ようやくという感じですが 6dof から値取得できた。 もうちょっと詳しくまとめたいが、とりあえず参考文献リスト
- mbed での I2C の扱い http://mbed.org/users/okini3939/notebook/I2C_jp/
- ITG-3200-Gyroscope http://mbed.org/cookbook/ITG-3200-Gyroscope
- 上記の sparkfun の 6dof の場合、アドレスを変更しないとダメ。0x68 に。
- ADXL345 Accelerometer http://mbed.org/cookbook/ADXL345-Accelerometer
- サンプルそのまま動く
- 近々自分で書きなおしたものを作りたいと思っています。
11/22
別のロボットを作っていたので、こちらの更新ができませんでした。 駆動系の部品をどれにするか迷っていたのですが、だいたい決まったので書いておく。
- ブラシレスモーター
- FC 28-22 Brushless Outrunner 1200kv に決めた。(以下仕様まとめ)
- KV : 1200RPM/V
- 直径 : 28mm, 全長 : 28.5mm
- Motor Length : 46mm
- Stator Size : 22x10mm
- シャフト径 : 3mm
- 重量 : 39g
- 最大効率:82%
- 最大効率時の電流量: 7 -16 A (>75%)※16A付近では最大60秒以内の使用に限ります
- 無負荷時 : 10 V/ 0.9 A
- 内部抵抗値: 150 mohm
- 2-3セルリポ用(11.1V, 7.4V)
- 適合ペラ8*3.7-10*5
- Prop size: 10x5, RPM: 7100, Max Curr: 14.5A, Thrust: 710g
- Prop size: 10x4.7 SF, RPM: 6100, Max Curr: 14.5A, Thrust: 745g
- RC e-techでは 840円。(11/22現在)
- このモータを作ってる会社の公式HPは見つからないので、通販のサイトのリンクを色々張っておく。
- http://www.rc-e-tech.co.jp/eccube/html/products/detail.php?product_id=3390&PHPSESSID=f3b403fd57dc82987f83505b1bf99a30
- http://www.kkhobby.com/SHOP/BL043.html
- http://www.headsuprc.com/servlet/the-1516/Emax-CF2822-Outrunner-Brushless/Detail
- http://www.valuehobby.com/emax-cf2822-outrunner.html
- http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=5354


- mbed で制御できるかどうかは未確認。買ったらやってみる。
- FC 28-22 Brushless Outrunner 1200kv に決めた。(以下仕様まとめ)
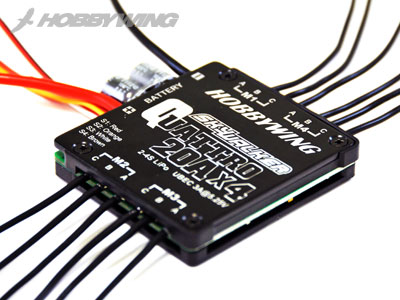
- アンプ
- 4IN1ブラシレスアンプ SKYWALKER QUATTRO20A に決めた。
- 出力:各アンプ連続電流20A,最大電流25A10秒
- 電圧入力:5.6V-26V (Lipo:2-4セル、NiMh/NiCd:5-12セル)
- BEC出力:5V@3A(3A/5V スイッチモード)
- 最高回転数:2極210000回/毎分,6極70000回/毎分,12極35000回/毎分
- 寸法: 70mm(長さ)*62mm(幅)*11mm(高さ)
- アンプ用接続コード長さ:25.5cm
- 重量: 112g
- 20AながらスイッチタイプのBEC内蔵モデル
- オーバーヒート、低電圧カットオフなど充実の保護機能
- 4つのESCそれぞれにスロットルレンジの設定やお手持ちの受信機・送信機に合わせて利用可能
- 普通はモーター1つにアンプ1つを用意する(つまり合計で4つずつ)。こうすると配線が煩雑になるので、クアッドコプター用に4つのアンプを一つにまとめてしまったのがこの製品。電源系統が一つにまとまるのでいい。
- RC e-tech では 4,800円。


- 4IN1ブラシレスアンプ SKYWALKER QUATTRO20A に決めた。
- プロペラ
- ARC8*38正逆ペラセット ARMC0838 が候補。
- APCと同性能を持つ高効率ペラARC 8*38 正逆2枚セット
- Length : 8 [inch]
- Pitch : 3.8 [inch]
- プラスチックペラに比べて非常に強度が高く折れにくく高効率
- RC e-tech では正逆ペアで 380円。
- 10inch のペラも考えているが、とりあえず 8inch で試してみようと思う。

- ARC8*38正逆ペラセット ARMC0838 が候補。
- モーターとプロペラをつなぐアダプタ
- モーターのシャフト径は 3mm なので、3mm 用のコレットアダプタを選ぶ。
- Hyperion ロング 3.0mmコレットアダプタ M5(EP) HP-ADAP-30L (380円) を買おう。

- 電源系 : まだ決まっていない
- バッテリー
- バッテリー充電器
- バッテリー安全装置
11/26
とりあえず 6degrees-of-freedom からの加速度センサ/ジャイロセンサからの同時値取得プログラムを作っておいた。
Import program6DoF_IMU_readvalue
Get value from Sparkfun IMU module, 6-degrees-of-freedom (ITG-3200/ADXL345) Gyro sensor and Accel sensor is included.
Last commit 26 Nov 2012 by Ryo Nakabayashi
期末試験なので更新停止かも。部品注文して、続きは冬休みに。
12/18
冬休みに突入したので更新再開。開発コードは QRdrone に決定。複数人で開発したいので、githubとかにもリポジトリ作った。
12/19
注文していたモーター・モーターコントローラ・プロペラが届いた。
フレームにモーターマウント用の穴を開けて、装着してみた。


バッテリーは資金不足のため買えなかったので、まだモーターは回せないが、とりあえず仮組み。

ちょっとかっこ良くなったかも…

12/20
Xbeeのプロトコル関連を考えた /users/ryought/notebook/qrdrone/#24
xbee経由のpcからのコマンド受信、コマンド送信部分のプログラムを書いてしまおうかと思っていたけど。
追加で注文する部品を考えた。モーター2つ、バッテリー、バッテリー充電器、コネクタ類(モータにコネクタが付いていなかったもので)が必要。
- モーター : E-MAX CF2822 1200KV 2個
- バッテリー : Lipoバッテリー KYPOM K6 11.1V 2200mA 35C-70C /13A8A
- コネクタ : 不詳
- 充電器
3/15
買えなかった残りのモータ・バッテリー・充電器を注文、到着した。
3/16
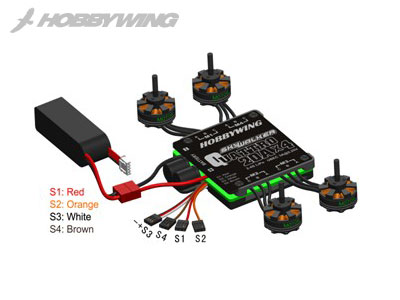
試運転させてみようとしたけどアンプの使い方がいまいちよくわからない。説明書をしっかり読もう。 説明書 : https://dl.dropbox.com/u/21658374/HW-SM006ENG.pdf (dropboxにリンクされてる。ショップの人が上げたのか?) /users/ryought/notebook/hobbywing_skywalker_quattro20a4_disc_ja/
3/18
RCカー用に持っていた Futaba R152JE(2 channel receiver AM 27MHz) を使って、ESC に送る波形を調べる。
 ニュートラル時の波形。
ニュートラル時の波形。
 スロットル最高(100%)時の波形
スロットル最高(100%)時の波形
 スロットル最低(0%)時の波形
スロットル最低(0%)時の波形
 一周期を計測
一周期を計測
pwmout とかで簡単に出せるのかな。調べよう
R152JE には信号用のコネクタが BATT. / CH.1 / CH.2 の3つある。基本的に CH.1 はステアリング用のサーボへの信号、CH.2 は ESC からの電源供給(Batt.の代用)とスロットルへの信号、らしい。

RTOS についても調べている。
Import programrtos_serial_command_test
multi thread test(rtos)
Last commit 18 Mar 2013 by Ryo Nakabayashi
LED4 はずっと点滅、LED2/3 は Serial で FF FF 01 01 / FF FF 02 01 を送ることで点灯消灯切り替え。 ヘリコプターのプログラムにしても、姿勢制御の thread と xbee からのコマンド待ちの thread を同時に動かすような感じになると思う。このプログラムを拡張していく感じになるかと
2 comments on QRdrone(mbed_quadcopter) building log:
Please log in to post comments.
QRdrone(mbed_quadcopter) building log
Page owner: Ryo Nakabayashi
Created 14 Mar 2013.
Last updated 18 Mar 2013
Looks very nice, I am looking forward to see pictures of your QRdrone flying!