PROCESADORES - 2016-03. TAREA 1. PID+ANDROID+BLUETOOTH
Dependencies: DebouncedIn QEI TextLCD mbed
Fork of
PID_ENCODER_OK
by  Gustavo Ramirez
Gustavo Ramirez
Tarea 1: PID + Android + Bluetooth
PROCESADORES - 2016-03
Por:
- Jaime Alonso Osorio Palacio
- David Fuertes Chaguezac
- Wilson Anibal Ortega Andrade
- John Wilmer Ruiz López
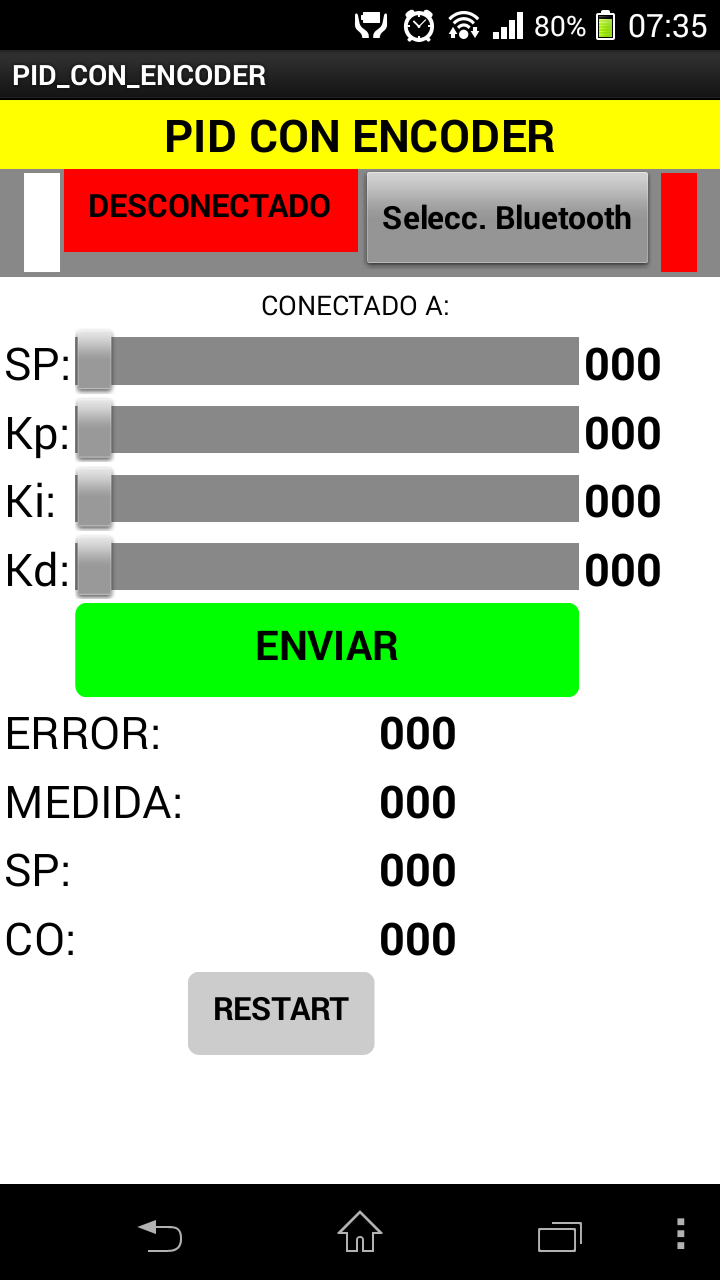
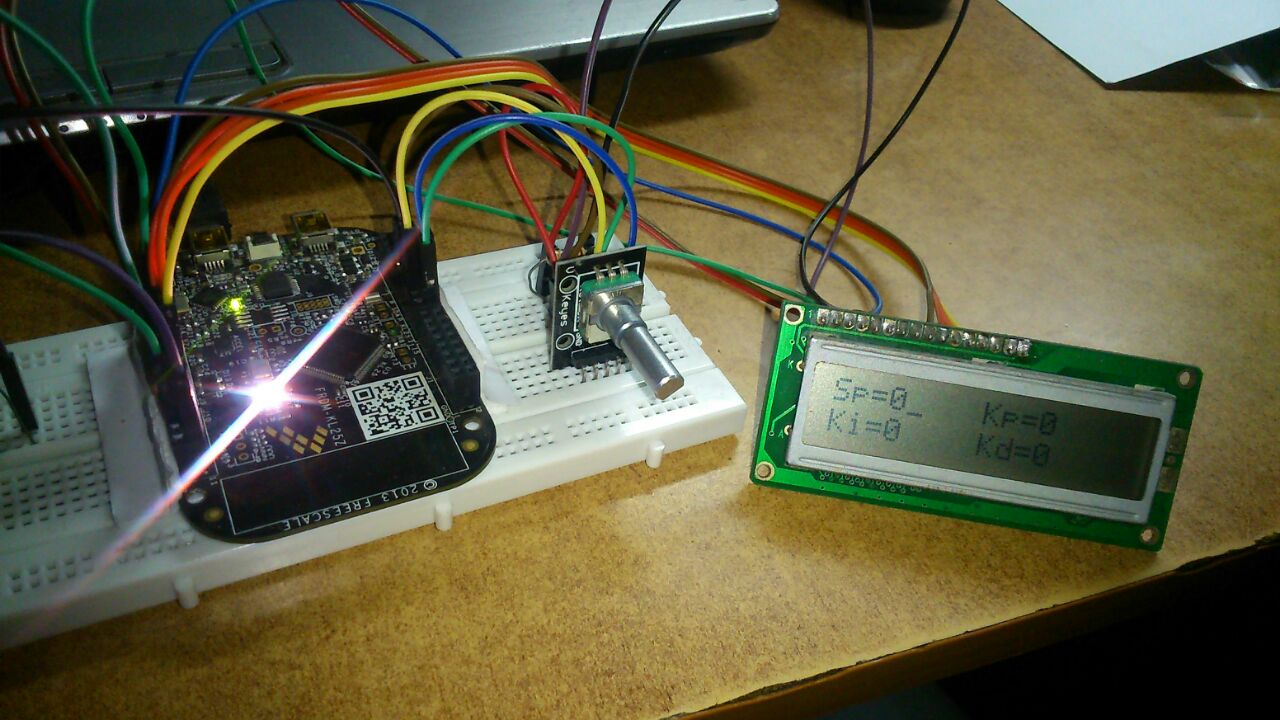
Recibe por medio de un módulo Bluetooth HC-05 ZS-040 desde un dispositivo Android los parámetros SP, KP, KI y KD. Crea un PID que se prueba sobre una planta de primer orden RC conformado por una resistencia R=11kOhm y un capacitor C=22uF cuya salida y realimentación se conectan por los puertos analógicos determinados en la FRDM KL25Z. Para más información:
- https://developer.mbed.org/users/tony63/code/PID_ENCODER_OK/
Reenvía continuamente el error, la medida, el SP y la acción de control hacia el dispositivo Android. Estos también son mostrados en una LCD 16x2.
Posee depuración via USB en una terminal (se usó Termite 3.2.) para conocer los estados en los que se encuentra el programa y verificar los datos.
La aplicación para Android se realizó en APP Inventor y se puede descargar en:
- https://www.dropbox.com/s/gfhh003rq3nknmp/PID_ANDRIOD_ENTEROS.aia?dl=0
IMÁGENES:
main.cpp@1:058b8f5c135d, 2016-04-24 (annotated)
- Committer:
- tony63
- Date:
- Sun Apr 24 18:32:52 2016 +0000
- Revision:
- 1:058b8f5c135d
- Parent:
- 0:4e0dfcf0e7ce
- Child:
- 2:278af91e46ff
Control PID gen?rico que se parametriza con un encoder rotatorio. Todos los c?lculos se procesan en coma flotante. Se imprimen sin cifras significativas por dificultades de impresi?n en la LCD.
Who changed what in which revision?
| User | Revision | Line number | New contents of line |
|---|---|---|---|
| tony63 | 0:4e0dfcf0e7ce | 1 | #include "mbed.h" |
| tony63 | 0:4e0dfcf0e7ce | 2 | #include "QEI.h" |
| tony63 | 0:4e0dfcf0e7ce | 3 | #include "TextLCD.h" |
| tony63 | 0:4e0dfcf0e7ce | 4 | |
| tony63 | 0:4e0dfcf0e7ce | 5 | TextLCD lcd(PTB10, PTB11, PTE2, PTE3, PTE4, PTE5); // rs, e, d4-d7 |
| tony63 | 0:4e0dfcf0e7ce | 6 | QEI encoder (PTA13, PTD5, NC, 624); |
| tony63 | 1:058b8f5c135d | 7 | AnalogIn y(PTB3);//entrada analoga |
| tony63 | 0:4e0dfcf0e7ce | 8 | AnalogOut u(PTE30);//salida analoga OJO solo se le pueden drenar 1.5mA en circuitos use un Buffer |
| tony63 | 0:4e0dfcf0e7ce | 9 | //si se ignora esto se arruina la FRDMKL25Z |
| tony63 | 0:4e0dfcf0e7ce | 10 | DigitalOut led1(LED1); |
| tony63 | 0:4e0dfcf0e7ce | 11 | DigitalOut led2(LED2); |
| tony63 | 0:4e0dfcf0e7ce | 12 | DigitalOut led3(LED3); |
| tony63 | 0:4e0dfcf0e7ce | 13 | |
| tony63 | 0:4e0dfcf0e7ce | 14 | DigitalIn button3(PTC16);//cambia ingreso de los 4 parametros |
| tony63 | 0:4e0dfcf0e7ce | 15 | DigitalIn button4(PTC17);//termina y consolida valores de 4 parametros y sale del loop |
| tony63 | 0:4e0dfcf0e7ce | 16 | |
| tony63 | 0:4e0dfcf0e7ce | 17 | |
| tony63 | 0:4e0dfcf0e7ce | 18 | //codigos movimiento del curzor |
| tony63 | 0:4e0dfcf0e7ce | 19 | |
| tony63 | 0:4e0dfcf0e7ce | 20 | //int C1=0x0E; // solo muestra el curzor |
| tony63 | 0:4e0dfcf0e7ce | 21 | int C2=0x18; // desplaza izquierda |
| tony63 | 0:4e0dfcf0e7ce | 22 | int C3=0x1A; // desplaza derecha |
| tony63 | 0:4e0dfcf0e7ce | 23 | int C4=0x0C; // quito cursor bajo |
| tony63 | 0:4e0dfcf0e7ce | 24 | |
| tony63 | 0:4e0dfcf0e7ce | 25 | int C1=0x0F; |
| tony63 | 1:058b8f5c135d | 26 | int cambio=0, diferencia=0; |
| tony63 | 1:058b8f5c135d | 27 | float pid,o,ai,ad,ap,med,err; |
| tony63 | 1:058b8f5c135d | 28 | float err_v; |
| tony63 | 0:4e0dfcf0e7ce | 29 | int spnum=0,kinum=0,kpnum=0,kdnum=0,pos=1; |
| tony63 | 0:4e0dfcf0e7ce | 30 | |
| tony63 | 0:4e0dfcf0e7ce | 31 | int main() |
| tony63 | 0:4e0dfcf0e7ce | 32 | { |
| tony63 | 0:4e0dfcf0e7ce | 33 | lcd.locate(0,1); |
| tony63 | 0:4e0dfcf0e7ce | 34 | lcd.printf("**Control PID**"); |
| tony63 | 0:4e0dfcf0e7ce | 35 | wait(2); |
| tony63 | 0:4e0dfcf0e7ce | 36 | lcd.cls(); // Borrar Pantalla |
| tony63 | 0:4e0dfcf0e7ce | 37 | lcd.writeCommand(C1);//escribimos un comando segun el manual del modulo LCD |
| tony63 | 0:4e0dfcf0e7ce | 38 | |
| tony63 | 0:4e0dfcf0e7ce | 39 | lcd.locate(8,0); |
| tony63 | 0:4e0dfcf0e7ce | 40 | lcd.printf("Kp=%d",kpnum); |
| tony63 | 0:4e0dfcf0e7ce | 41 | lcd.locate(0,1); |
| tony63 | 0:4e0dfcf0e7ce | 42 | lcd.printf("Ki=%d",kinum); |
| tony63 | 0:4e0dfcf0e7ce | 43 | lcd.locate(8,1); |
| tony63 | 0:4e0dfcf0e7ce | 44 | lcd.printf("Kd=%d",kdnum); |
| tony63 | 0:4e0dfcf0e7ce | 45 | lcd.locate(0,0); |
| tony63 | 0:4e0dfcf0e7ce | 46 | lcd.printf("Sp=%d",spnum); |
| tony63 | 0:4e0dfcf0e7ce | 47 | |
| tony63 | 0:4e0dfcf0e7ce | 48 | while(1) |
| tony63 | 0:4e0dfcf0e7ce | 49 | { |
| tony63 | 0:4e0dfcf0e7ce | 50 | //lcd.locate(8,0); |
| tony63 | 0:4e0dfcf0e7ce | 51 | //lcd.printf("Kp=%d",encoder.getPulses()); |
| tony63 | 0:4e0dfcf0e7ce | 52 | //wait(.5); |
| tony63 | 0:4e0dfcf0e7ce | 53 | |
| tony63 | 0:4e0dfcf0e7ce | 54 | diferencia=encoder.getPulses()-cambio; |
| tony63 | 0:4e0dfcf0e7ce | 55 | cambio=encoder.getPulses(); |
| tony63 | 0:4e0dfcf0e7ce | 56 | |
| tony63 | 0:4e0dfcf0e7ce | 57 | if (diferencia==0) |
| tony63 | 0:4e0dfcf0e7ce | 58 | { |
| tony63 | 0:4e0dfcf0e7ce | 59 | //nada |
| tony63 | 0:4e0dfcf0e7ce | 60 | } |
| tony63 | 0:4e0dfcf0e7ce | 61 | else if(diferencia>0) |
| tony63 | 0:4e0dfcf0e7ce | 62 | { |
| tony63 | 0:4e0dfcf0e7ce | 63 | if(pos==1) |
| tony63 | 0:4e0dfcf0e7ce | 64 | { |
| tony63 | 1:058b8f5c135d | 65 | if(spnum+diferencia>=999) |
| tony63 | 0:4e0dfcf0e7ce | 66 | { |
| tony63 | 1:058b8f5c135d | 67 | spnum=999; |
| tony63 | 0:4e0dfcf0e7ce | 68 | lcd.locate(3,0); |
| tony63 | 0:4e0dfcf0e7ce | 69 | lcd.printf(" "); |
| tony63 | 0:4e0dfcf0e7ce | 70 | lcd.locate(3,0); |
| tony63 | 0:4e0dfcf0e7ce | 71 | lcd.printf("%d", spnum); |
| tony63 | 0:4e0dfcf0e7ce | 72 | } |
| tony63 | 0:4e0dfcf0e7ce | 73 | else |
| tony63 | 0:4e0dfcf0e7ce | 74 | { |
| tony63 | 0:4e0dfcf0e7ce | 75 | spnum+=diferencia; |
| tony63 | 0:4e0dfcf0e7ce | 76 | lcd.locate(3,0); |
| tony63 | 0:4e0dfcf0e7ce | 77 | lcd.printf("%d", spnum); |
| tony63 | 0:4e0dfcf0e7ce | 78 | } |
| tony63 | 0:4e0dfcf0e7ce | 79 | } |
| tony63 | 0:4e0dfcf0e7ce | 80 | else if(pos==2) |
| tony63 | 0:4e0dfcf0e7ce | 81 | { |
| tony63 | 1:058b8f5c135d | 82 | if(kpnum+diferencia>=999) |
| tony63 | 0:4e0dfcf0e7ce | 83 | { |
| tony63 | 1:058b8f5c135d | 84 | kpnum=999; |
| tony63 | 0:4e0dfcf0e7ce | 85 | lcd.locate(11,0); |
| tony63 | 0:4e0dfcf0e7ce | 86 | lcd.printf(" "); |
| tony63 | 0:4e0dfcf0e7ce | 87 | lcd.locate(11,0); |
| tony63 | 0:4e0dfcf0e7ce | 88 | lcd.printf("%d", kpnum); |
| tony63 | 0:4e0dfcf0e7ce | 89 | } |
| tony63 | 0:4e0dfcf0e7ce | 90 | else |
| tony63 | 0:4e0dfcf0e7ce | 91 | { |
| tony63 | 0:4e0dfcf0e7ce | 92 | kpnum+=diferencia; |
| tony63 | 0:4e0dfcf0e7ce | 93 | lcd.locate(11,0); |
| tony63 | 0:4e0dfcf0e7ce | 94 | lcd.printf("%d", kpnum); |
| tony63 | 0:4e0dfcf0e7ce | 95 | } |
| tony63 | 0:4e0dfcf0e7ce | 96 | } |
| tony63 | 0:4e0dfcf0e7ce | 97 | else if(pos==3) |
| tony63 | 0:4e0dfcf0e7ce | 98 | { |
| tony63 | 1:058b8f5c135d | 99 | if(kinum+diferencia>=999) |
| tony63 | 0:4e0dfcf0e7ce | 100 | { |
| tony63 | 1:058b8f5c135d | 101 | kinum=999; |
| tony63 | 0:4e0dfcf0e7ce | 102 | lcd.locate(3,1); |
| tony63 | 0:4e0dfcf0e7ce | 103 | lcd.printf(" "); |
| tony63 | 0:4e0dfcf0e7ce | 104 | lcd.locate(3,1); |
| tony63 | 0:4e0dfcf0e7ce | 105 | lcd.printf("%d", kinum); |
| tony63 | 0:4e0dfcf0e7ce | 106 | } |
| tony63 | 0:4e0dfcf0e7ce | 107 | else |
| tony63 | 0:4e0dfcf0e7ce | 108 | { |
| tony63 | 0:4e0dfcf0e7ce | 109 | kinum+=diferencia; |
| tony63 | 0:4e0dfcf0e7ce | 110 | lcd.locate(3,1); |
| tony63 | 0:4e0dfcf0e7ce | 111 | lcd.printf("%d", kinum); |
| tony63 | 0:4e0dfcf0e7ce | 112 | } |
| tony63 | 0:4e0dfcf0e7ce | 113 | } |
| tony63 | 0:4e0dfcf0e7ce | 114 | else if(pos==4) |
| tony63 | 0:4e0dfcf0e7ce | 115 | { |
| tony63 | 1:058b8f5c135d | 116 | if(kdnum+diferencia>=999) |
| tony63 | 0:4e0dfcf0e7ce | 117 | { |
| tony63 | 1:058b8f5c135d | 118 | kdnum=999; |
| tony63 | 0:4e0dfcf0e7ce | 119 | lcd.locate(11,1); |
| tony63 | 0:4e0dfcf0e7ce | 120 | lcd.printf(" "); |
| tony63 | 0:4e0dfcf0e7ce | 121 | lcd.locate(11,1); |
| tony63 | 0:4e0dfcf0e7ce | 122 | lcd.printf("%d", kdnum); |
| tony63 | 0:4e0dfcf0e7ce | 123 | } |
| tony63 | 0:4e0dfcf0e7ce | 124 | else |
| tony63 | 0:4e0dfcf0e7ce | 125 | { |
| tony63 | 0:4e0dfcf0e7ce | 126 | kdnum+=diferencia; |
| tony63 | 0:4e0dfcf0e7ce | 127 | lcd.locate(11,1); |
| tony63 | 0:4e0dfcf0e7ce | 128 | lcd.printf("%d", kdnum); |
| tony63 | 0:4e0dfcf0e7ce | 129 | } |
| tony63 | 0:4e0dfcf0e7ce | 130 | } |
| tony63 | 0:4e0dfcf0e7ce | 131 | } |
| tony63 | 0:4e0dfcf0e7ce | 132 | |
| tony63 | 0:4e0dfcf0e7ce | 133 | else if(diferencia<0) |
| tony63 | 0:4e0dfcf0e7ce | 134 | { |
| tony63 | 0:4e0dfcf0e7ce | 135 | if(pos==1) |
| tony63 | 0:4e0dfcf0e7ce | 136 | { |
| tony63 | 0:4e0dfcf0e7ce | 137 | if(spnum+diferencia<0) |
| tony63 | 0:4e0dfcf0e7ce | 138 | { |
| tony63 | 0:4e0dfcf0e7ce | 139 | //No ocurre nada |
| tony63 | 0:4e0dfcf0e7ce | 140 | } |
| tony63 | 0:4e0dfcf0e7ce | 141 | else |
| tony63 | 0:4e0dfcf0e7ce | 142 | { |
| tony63 | 0:4e0dfcf0e7ce | 143 | spnum+=diferencia; |
| tony63 | 0:4e0dfcf0e7ce | 144 | lcd.locate(3,0); |
| tony63 | 0:4e0dfcf0e7ce | 145 | lcd.printf(" "); |
| tony63 | 0:4e0dfcf0e7ce | 146 | lcd.locate(3,0); |
| tony63 | 0:4e0dfcf0e7ce | 147 | lcd.printf("%d", spnum); |
| tony63 | 0:4e0dfcf0e7ce | 148 | } |
| tony63 | 0:4e0dfcf0e7ce | 149 | } |
| tony63 | 0:4e0dfcf0e7ce | 150 | else if(pos==2) |
| tony63 | 0:4e0dfcf0e7ce | 151 | { |
| tony63 | 0:4e0dfcf0e7ce | 152 | if(kpnum+diferencia<0) |
| tony63 | 0:4e0dfcf0e7ce | 153 | { |
| tony63 | 0:4e0dfcf0e7ce | 154 | //No ocurre nada |
| tony63 | 0:4e0dfcf0e7ce | 155 | } |
| tony63 | 0:4e0dfcf0e7ce | 156 | else |
| tony63 | 0:4e0dfcf0e7ce | 157 | { |
| tony63 | 0:4e0dfcf0e7ce | 158 | kpnum+=diferencia; |
| tony63 | 0:4e0dfcf0e7ce | 159 | lcd.locate(11,0); |
| tony63 | 0:4e0dfcf0e7ce | 160 | lcd.printf(" "); |
| tony63 | 0:4e0dfcf0e7ce | 161 | lcd.locate(11,0); |
| tony63 | 0:4e0dfcf0e7ce | 162 | lcd.printf("%d", kpnum); |
| tony63 | 0:4e0dfcf0e7ce | 163 | } |
| tony63 | 0:4e0dfcf0e7ce | 164 | } |
| tony63 | 0:4e0dfcf0e7ce | 165 | else if(pos==3) |
| tony63 | 0:4e0dfcf0e7ce | 166 | { |
| tony63 | 0:4e0dfcf0e7ce | 167 | if(kinum+diferencia<0) |
| tony63 | 0:4e0dfcf0e7ce | 168 | { |
| tony63 | 0:4e0dfcf0e7ce | 169 | //No ocurre nada |
| tony63 | 0:4e0dfcf0e7ce | 170 | } |
| tony63 | 0:4e0dfcf0e7ce | 171 | else |
| tony63 | 0:4e0dfcf0e7ce | 172 | { |
| tony63 | 0:4e0dfcf0e7ce | 173 | kinum+=diferencia; |
| tony63 | 0:4e0dfcf0e7ce | 174 | lcd.locate(3,1); |
| tony63 | 0:4e0dfcf0e7ce | 175 | lcd.printf(" "); |
| tony63 | 0:4e0dfcf0e7ce | 176 | lcd.locate(3,1); |
| tony63 | 0:4e0dfcf0e7ce | 177 | lcd.printf("%d", kinum); |
| tony63 | 0:4e0dfcf0e7ce | 178 | } |
| tony63 | 0:4e0dfcf0e7ce | 179 | } |
| tony63 | 0:4e0dfcf0e7ce | 180 | else if(pos==4) |
| tony63 | 0:4e0dfcf0e7ce | 181 | { |
| tony63 | 0:4e0dfcf0e7ce | 182 | if(kdnum+diferencia<0) |
| tony63 | 0:4e0dfcf0e7ce | 183 | { |
| tony63 | 0:4e0dfcf0e7ce | 184 | //No ocurre nada |
| tony63 | 0:4e0dfcf0e7ce | 185 | } |
| tony63 | 0:4e0dfcf0e7ce | 186 | else |
| tony63 | 0:4e0dfcf0e7ce | 187 | { |
| tony63 | 0:4e0dfcf0e7ce | 188 | kdnum+=diferencia; |
| tony63 | 0:4e0dfcf0e7ce | 189 | lcd.locate(11,1); |
| tony63 | 0:4e0dfcf0e7ce | 190 | lcd.printf(" "); |
| tony63 | 0:4e0dfcf0e7ce | 191 | lcd.locate(11,1); |
| tony63 | 0:4e0dfcf0e7ce | 192 | lcd.printf("%d", kdnum); |
| tony63 | 0:4e0dfcf0e7ce | 193 | } |
| tony63 | 0:4e0dfcf0e7ce | 194 | } |
| tony63 | 0:4e0dfcf0e7ce | 195 | } |
| tony63 | 0:4e0dfcf0e7ce | 196 | |
| tony63 | 0:4e0dfcf0e7ce | 197 | if (!button3) //cambia la posicion de ingreso de parametros |
| tony63 | 0:4e0dfcf0e7ce | 198 | { |
| tony63 | 0:4e0dfcf0e7ce | 199 | led3 =!led3; |
| tony63 | 0:4e0dfcf0e7ce | 200 | if(pos==4) |
| tony63 | 0:4e0dfcf0e7ce | 201 | { |
| tony63 | 0:4e0dfcf0e7ce | 202 | pos=1; |
| tony63 | 0:4e0dfcf0e7ce | 203 | lcd.locate(3,0); |
| tony63 | 0:4e0dfcf0e7ce | 204 | lcd.printf("%d", spnum); |
| tony63 | 0:4e0dfcf0e7ce | 205 | } |
| tony63 | 0:4e0dfcf0e7ce | 206 | else if (pos==1) |
| tony63 | 0:4e0dfcf0e7ce | 207 | { |
| tony63 | 0:4e0dfcf0e7ce | 208 | pos++; |
| tony63 | 0:4e0dfcf0e7ce | 209 | lcd.locate(11,0); |
| tony63 | 0:4e0dfcf0e7ce | 210 | lcd.printf("%d", kpnum); |
| tony63 | 0:4e0dfcf0e7ce | 211 | } |
| tony63 | 0:4e0dfcf0e7ce | 212 | else if(pos==2) |
| tony63 | 0:4e0dfcf0e7ce | 213 | { |
| tony63 | 0:4e0dfcf0e7ce | 214 | pos++; |
| tony63 | 0:4e0dfcf0e7ce | 215 | lcd.locate(3,1); |
| tony63 | 0:4e0dfcf0e7ce | 216 | lcd.printf("%d", kinum); |
| tony63 | 0:4e0dfcf0e7ce | 217 | } |
| tony63 | 0:4e0dfcf0e7ce | 218 | else if(pos==3) |
| tony63 | 0:4e0dfcf0e7ce | 219 | { |
| tony63 | 0:4e0dfcf0e7ce | 220 | pos++; |
| tony63 | 0:4e0dfcf0e7ce | 221 | lcd.locate(11,1); |
| tony63 | 0:4e0dfcf0e7ce | 222 | lcd.printf("%d", kdnum); |
| tony63 | 0:4e0dfcf0e7ce | 223 | } |
| tony63 | 0:4e0dfcf0e7ce | 224 | wait(0.25); |
| tony63 | 0:4e0dfcf0e7ce | 225 | |
| tony63 | 0:4e0dfcf0e7ce | 226 | } |
| tony63 | 0:4e0dfcf0e7ce | 227 | |
| tony63 | 0:4e0dfcf0e7ce | 228 | if (!button4) |
| tony63 | 0:4e0dfcf0e7ce | 229 | { |
| tony63 | 0:4e0dfcf0e7ce | 230 | break; //sale del bucle si pisan suiche4 |
| tony63 | 0:4e0dfcf0e7ce | 231 | } |
| tony63 | 0:4e0dfcf0e7ce | 232 | wait(0.1); |
| tony63 | 0:4e0dfcf0e7ce | 233 | } |
| tony63 | 0:4e0dfcf0e7ce | 234 | |
| tony63 | 0:4e0dfcf0e7ce | 235 | |
| tony63 | 0:4e0dfcf0e7ce | 236 | //Transicion |
| tony63 | 0:4e0dfcf0e7ce | 237 | lcd.writeCommand(C4);//escribimos un comando segun el manual del modulo LCD para quitar cursor bajo |
| tony63 | 0:4e0dfcf0e7ce | 238 | lcd.cls(); //borra la pantalla |
| tony63 | 0:4e0dfcf0e7ce | 239 | lcd.printf(" GUARDADOS!"); |
| tony63 | 0:4e0dfcf0e7ce | 240 | wait(1); |
| tony63 | 0:4e0dfcf0e7ce | 241 | lcd.cls(); |
| tony63 | 0:4e0dfcf0e7ce | 242 | lcd.printf(" INICIA EL PID"); |
| tony63 | 0:4e0dfcf0e7ce | 243 | wait(1); |
| tony63 | 0:4e0dfcf0e7ce | 244 | // se imprimen los parches del control ***************************************** |
| tony63 | 0:4e0dfcf0e7ce | 245 | lcd.cls(); |
| tony63 | 1:058b8f5c135d | 246 | lcd.printf("Er=%3.0f",err); |
| tony63 | 0:4e0dfcf0e7ce | 247 | lcd.locate(8,0); |
| tony63 | 1:058b8f5c135d | 248 | lcd.printf("Me=%3.0f",med); |
| tony63 | 0:4e0dfcf0e7ce | 249 | lcd.locate(0,1); |
| tony63 | 1:058b8f5c135d | 250 | lcd.printf("Sp=%3.0f",spnum); |
| tony63 | 0:4e0dfcf0e7ce | 251 | lcd.locate(8,1); |
| tony63 | 1:058b8f5c135d | 252 | lcd.printf("Co=%3.0f",pid); |
| tony63 | 1:058b8f5c135d | 253 | wait(1); |
| tony63 | 0:4e0dfcf0e7ce | 254 | |
| tony63 | 0:4e0dfcf0e7ce | 255 | // CICLO PRINCIPAL CONTROLADOR PID |
| tony63 | 1:058b8f5c135d | 256 | lop1: med = y.read()*999; |
| tony63 | 0:4e0dfcf0e7ce | 257 | err = (spnum-med); //se calcula el error |
| tony63 | 1:058b8f5c135d | 258 | ap = kpnum*err*0.01f; //se calcula la accion proporcinal |
| tony63 | 1:058b8f5c135d | 259 | ai =(kinum*err*0.01f)+ai; //calculo de la integral del error |
| tony63 | 1:058b8f5c135d | 260 | ad = kdnum*(err-err_v)*0.01f; //calculo de la accion derivativa |
| tony63 | 0:4e0dfcf0e7ce | 261 | pid = (ap+ai+ad); |
| tony63 | 0:4e0dfcf0e7ce | 262 | // se verifica que pid sea positivo ************************************** |
| tony63 | 0:4e0dfcf0e7ce | 263 | if(pid<=0) |
| tony63 | 0:4e0dfcf0e7ce | 264 | { |
| tony63 | 0:4e0dfcf0e7ce | 265 | pid=0; |
| tony63 | 0:4e0dfcf0e7ce | 266 | } |
| tony63 | 0:4e0dfcf0e7ce | 267 | |
| tony63 | 0:4e0dfcf0e7ce | 268 | // se verifica que pid sea menor o igual la valor maximo ***************** |
| tony63 | 0:4e0dfcf0e7ce | 269 | if (pid > 999) |
| tony63 | 0:4e0dfcf0e7ce | 270 | { |
| tony63 | 0:4e0dfcf0e7ce | 271 | pid=999; |
| tony63 | 0:4e0dfcf0e7ce | 272 | } |
| tony63 | 0:4e0dfcf0e7ce | 273 | |
| tony63 | 1:058b8f5c135d | 274 | |
| tony63 | 0:4e0dfcf0e7ce | 275 | //se muestran las variables****************************************** |
| tony63 | 0:4e0dfcf0e7ce | 276 | lcd.locate(3,0); |
| tony63 | 0:4e0dfcf0e7ce | 277 | lcd.printf(" "); |
| tony63 | 0:4e0dfcf0e7ce | 278 | lcd.locate(3,0); |
| tony63 | 1:058b8f5c135d | 279 | lcd.printf("%3.0f",err); |
| tony63 | 0:4e0dfcf0e7ce | 280 | lcd.locate(11,0); |
| tony63 | 1:058b8f5c135d | 281 | lcd.printf(" "); |
| tony63 | 0:4e0dfcf0e7ce | 282 | lcd.locate(11,0); |
| tony63 | 1:058b8f5c135d | 283 | lcd.printf("%3.0f",med); |
| tony63 | 0:4e0dfcf0e7ce | 284 | lcd.locate(3,1); |
| tony63 | 1:058b8f5c135d | 285 | lcd.printf(" "); |
| tony63 | 0:4e0dfcf0e7ce | 286 | lcd.locate(3,1); |
| tony63 | 0:4e0dfcf0e7ce | 287 | lcd.printf("%d",spnum); |
| tony63 | 0:4e0dfcf0e7ce | 288 | lcd.locate(11,1); |
| tony63 | 1:058b8f5c135d | 289 | lcd.printf(" "); |
| tony63 | 0:4e0dfcf0e7ce | 290 | lcd.locate(11,1); |
| tony63 | 1:058b8f5c135d | 291 | lcd.printf("%3.0f",pid); |
| tony63 | 1:058b8f5c135d | 292 | |
| tony63 | 1:058b8f5c135d | 293 | |
| tony63 | 1:058b8f5c135d | 294 | |
| tony63 | 0:4e0dfcf0e7ce | 295 | |
| tony63 | 0:4e0dfcf0e7ce | 296 | //Normalizacion de la salida |
| tony63 | 1:058b8f5c135d | 297 | // se actualizan las variables ******************************************* |
| tony63 | 1:058b8f5c135d | 298 | err_v = err; |
| tony63 | 1:058b8f5c135d | 299 | o = pid/999; |
| tony63 | 1:058b8f5c135d | 300 | u.write(o); |
| tony63 | 0:4e0dfcf0e7ce | 301 | // se envia el valor pid a puerto analogico de salida (D/A) ************** |
| tony63 | 1:058b8f5c135d | 302 | |
| tony63 | 0:4e0dfcf0e7ce | 303 | // se repite el ciclo |
| tony63 | 1:058b8f5c135d | 304 | wait_ms(300); |
| tony63 | 1:058b8f5c135d | 305 | goto lop1; |
| tony63 | 0:4e0dfcf0e7ce | 306 | } |