You are viewing an older revision! See the latest version
LSM303D
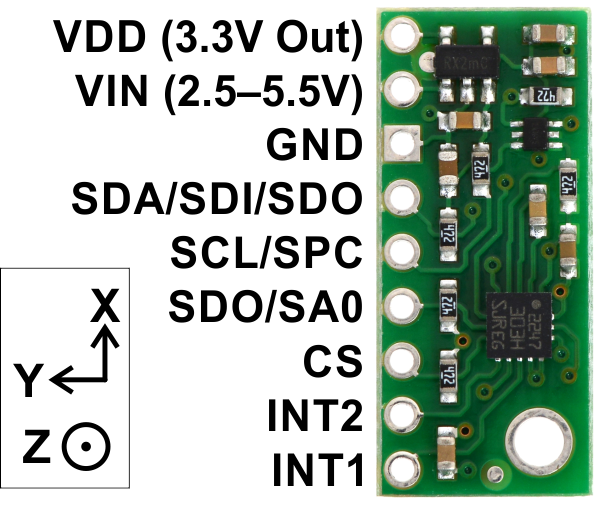
The LSM303D is a system-in-package featuring a 3D digital linear acceleration sensor and a 3D digital magnetic sensor. The LSM303D has linear acceleration full scales of ±2g / ±4g / ±6g / ±8g / ±16g and a magnetic field full scale of ±2 / ±4 / ±8 / ±12 gauss. The LSM303D includes an I2C serial bus interface that supports standard and fast mode (100 kHz and 400 kHz) and SPI serial standard interface. This LSM303 carrier board includes a 3.3 V voltage regulator and integrated level shifters that allows operation from 2.5 to 5.5 V, and the 0.1″ pin spacing makes it easy to use with standard solderless breadboards.
This notebook page will provide information to set up LSM303D to connect with mbed NXP LPC1768 using SPI communication.
Setup¶

SPI mode Pinout¶
| LSM303D pin | mbed pin for SPI 4-wire mode | Description |
|---|---|---|
| VDD | ||
| VIN | VOUT | 3.3V regulated out |
| GND | GND | |
| SDA | p5 | mosi |
| SCL | p7 | sck |
| SDO | p6 | miso |
| CS | p8 | chip select |
| INT2 | ||
| INT1 |
LSM303D library¶
Import libraryLSM303D
This is the device library for LSM303D to interface with mbed. This code has been tested on mbed NXP LPC1768.
Last commit 04 Dec 2016 by  Zhenxuan Zhang
Zhenxuan Zhang
LSM303D library Hello World¶
main.cpp
#include "mbed.h"
#include "LSM303D.h"
DigitalOut myled(LED1);
LSM303D lsm303d_1(p5, p6, p7, p8);
static int magx,magy,magz,accx,accy,accz;
static LSM303D::raw_data accxx,accyy,acczz,magxx,magyy,magzz;
static LSM303D::vector<LSM303D::raw_data> a,m;
int main() {
if(lsm303d_1.initialize()==0)
{
printf("Initialization failed\n");
}
while(1) {
magx= lsm303d_1.mag(LSM303D::X_AXIS);
magy= lsm303d_1.mag(LSM303D::Y_AXIS);
magz= lsm303d_1.mag(LSM303D::Z_AXIS);
lsm303d_1.mag(LSM303D::X_AXIS,&magxx);
lsm303d_1.mag(LSM303D::Y_AXIS,&magyy);
lsm303d_1.mag(LSM303D::Z_AXIS,&magzz);
m=lsm303d_1.mag();
accx= lsm303d_1.acc(LSM303D::X_AXIS);
accy= lsm303d_1.acc(LSM303D::Y_AXIS);
accz= lsm303d_1.acc(LSM303D::Z_AXIS);
lsm303d_1.acc(LSM303D::X_AXIS,&accxx);
lsm303d_1.acc(LSM303D::Y_AXIS,&accyy);
lsm303d_1.acc(LSM303D::Z_AXIS,&acczz);
a=lsm303d_1.acc();
printf("mag x: %d\n\rmag y: %d\n\rmag z: %d\n\n\r",magx,magy,magz);
printf("mag x: %d\n\rmag y: %d\n\rmag z: %d\n\n\r",magxx.raw,magyy.raw,magzz.raw);
printf("mag x: %d\n\rmag y: %d\n\rmag z: %d\n\n\r",m.x.raw,m.y.raw,m.z.raw);
printf("acc x: %d\n\racc y: %d\n\racc z: %d\n\n\r",accx,accy,accz);
printf("acc x: %d\n\racc y: %d\n\racc z: %d\n\n\r",accxx.raw,accyy.raw,acczz.raw);
printf("acc x: %d\n\racc y: %d\n\racc z: %d\n\n\r",a.x.raw,a.y.raw,a.z.raw);
myled = 1;
wait(1);
myled = 0;
wait(1);
}
}
Console output¶
