LSM303D
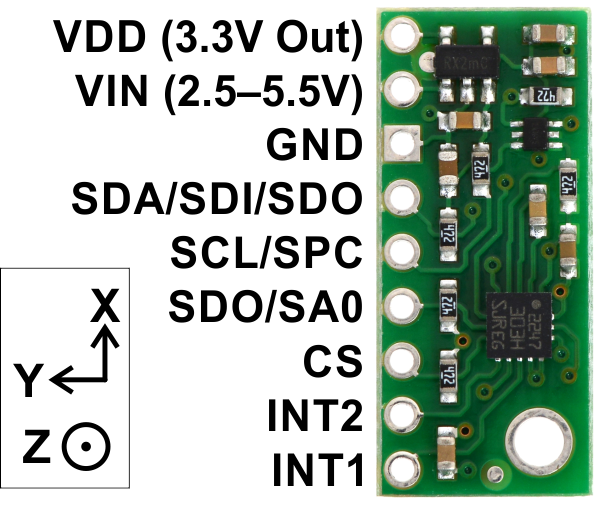
The LSM303D is a system-in-package featuring a 3D digital linear acceleration sensor and a 3D digital magnetic sensor. The LSM303D has linear acceleration full scales of ±2g / ±4g / ±6g / ±8g / ±16g and a magnetic field full scale of ±2 / ±4 / ±8 / ±12 gauss. The LSM303D includes an I2C serial bus interface that supports standard and fast mode (100 kHz and 400 kHz) and SPI serial standard interface. This LSM303 carrier board includes a 3.3 V voltage regulator and integrated level shifters that allows operation from 2.5 to 5.5 V, and the 0.1″ pin spacing makes it easy to use with standard solderless breadboards.
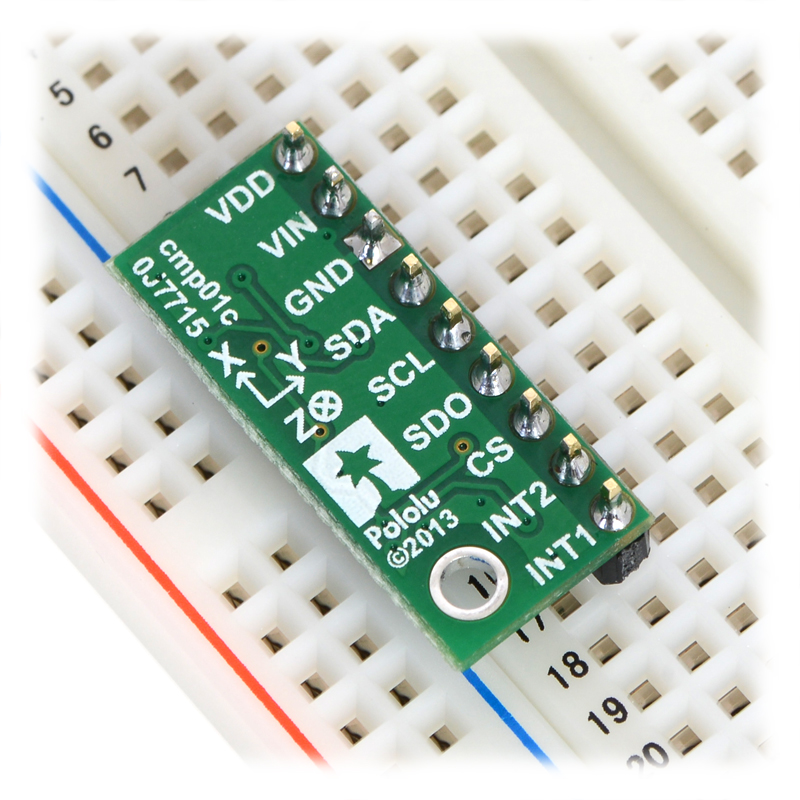
This notebook page will provide information to set up LSM303D to connect with mbed NXP LPC1768 using SPI communication.
Setup¶

SPI mode Pinout¶
| LSM303D pin | mbed pin for SPI 4-wire mode | Description |
|---|---|---|
| VDD | ||
| VIN | VOUT | 3.3V regulated out |
| GND | GND | |
| SDA | p5 | mosi |
| SCL | p7 | sck |
| SDO | p6 | miso |
| CS | p8 | chip select |
| INT2 | ||
| INT1 |
Magnetic Field Cancellation¶
The LSM303D is often used to calculate pitch, heading, and roll, using the earth's magnetic field to calculate the heading. Alternatively, the LSM303D can be used to track the location of a magnet relative to the chip. To accurately measure the magnet's location, users must cancel out the earth's magnetic field using rotational matrices to calculate the chip's orientation.
Rotational matrices are square matrices that project one directional vector onto another when multiplying the rotation matrix by the original vector. In the LSM303D library, the rotational matrix is calculated using the method found on the website Stack Exchange's math forum [Link].
When using only the accelerometer, there are two edge cases where the rotation algorithm fails. The first is when the chip has been rotated 180 degrees. In this state, there is no knowing which way to rotate the chip for it to end up back where it started. The second edge case is when the chip's accelerometer reference vector is aligned with one of the chip's axes. In this case, rotating the chip about the given axis causes no change for any of the axes.
Testing¶
The earth's magnetic field (EMF) cancellation was confirmed to be working by testing the algorithm through 90 degrees of motion. Using the setup seen below, the reference EMF value was taken at 45 degrees. The mbed and LSM303D were then rotated through all 90 degrees via 5 degree steps, taking the average of 10 adjusted EMF values at each.

The data from the test can be found below. As can be seen in the graph, the function was able to cancel out 80% of the EMF's magnitude for all 90 degrees. From 20 degrees to 70 degrees, the algorithm was able to cancel out 90% of the EMF's magnitude.

Additionally, the set_reference() method was verified to precisely provide the average of 10 emf values in a separate test.
LSM303D library¶
Import libraryLSM303D
This is the device library for LSM303D to interface with mbed. This code has been tested on mbed NXP LPC1768.
Last commit 04 Dec 2016 by  Zhenxuan Zhang
Zhenxuan Zhang
LSM303D library Hello World¶
main.cpp
#include "mbed.h"
#include "LSM303D.h"
DigitalOut myled(LED1);
LSM303D lsm303d_1(p5, p6, p7, p8);
static int magx,magy,magz,accx,accy,accz;
static LSM303D::raw_data accxx,accyy,acczz,magxx,magyy,magzz;
static LSM303D::vector<LSM303D::raw_data> a,m;
int main() {
if(lsm303d_1.initialize()==0)
{
printf("Initialization failed\n");
}
while(1) {
magx= lsm303d_1.mag(LSM303D::X_AXIS);
magy= lsm303d_1.mag(LSM303D::Y_AXIS);
magz= lsm303d_1.mag(LSM303D::Z_AXIS);
lsm303d_1.mag(LSM303D::X_AXIS,&magxx);
lsm303d_1.mag(LSM303D::Y_AXIS,&magyy);
lsm303d_1.mag(LSM303D::Z_AXIS,&magzz);
m=lsm303d_1.mag();
accx= lsm303d_1.acc(LSM303D::X_AXIS);
accy= lsm303d_1.acc(LSM303D::Y_AXIS);
accz= lsm303d_1.acc(LSM303D::Z_AXIS);
lsm303d_1.acc(LSM303D::X_AXIS,&accxx);
lsm303d_1.acc(LSM303D::Y_AXIS,&accyy);
lsm303d_1.acc(LSM303D::Z_AXIS,&acczz);
a=lsm303d_1.acc();
printf("mag x: %d\n\rmag y: %d\n\rmag z: %d\n\n\r",magx,magy,magz);
printf("mag x: %d\n\rmag y: %d\n\rmag z: %d\n\n\r",magxx.raw,magyy.raw,magzz.raw);
printf("mag x: %d\n\rmag y: %d\n\rmag z: %d\n\n\r",m.x.raw,m.y.raw,m.z.raw);
printf("acc x: %d\n\racc y: %d\n\racc z: %d\n\n\r",accx,accy,accz);
printf("acc x: %d\n\racc y: %d\n\racc z: %d\n\n\r",accxx.raw,accyy.raw,acczz.raw);
printf("acc x: %d\n\racc y: %d\n\racc z: %d\n\n\r",a.x.raw,a.y.raw,a.z.raw);
myled = 1;
wait(1);
myled = 0;
wait(1);
}
}
Console output¶
