RTOS overview
The Mbed OS RTOS capabilities include managing objects such as threads, synchronization objects and timers. It also provides interfaces for attaching an application-specific idle hook function, reads the OS tick count and implements functionality to report RTOS errors.
The code of the Mbed RTOS can be found in the mbed-os repository, in the RTOS subdirectory. See the Doxygen for more information.
Memory considerations
Memory for the RTOS primitives is allocated as part of the C++ objects on the stack unless you explicitly use dynamic allocation, in which case it is placed on the heap. Exceptions to this rule are user's thread stacks, which by default are allocated on the heap. You can provide your own memory in the construction if you'd rather not use dynamic memory in your system. For details, please see the Thread class documentation.
Note: Mbed OS overrides the RTX default memory pool approach.
RTOS Ticker
Platforms using RTOS, including Mbed OS, need a mechanism for counting the time and scheduling tasks. A timer that generates periodic interrupts and is called system tick timer usually does this. Under Mbed OS, we call this mechanism the RTOS ticker.
SysTick is a standard timer available on most Cortex-M cores. Its main purpose is to raise an interrupt with set frequency (usually 1ms). In addition, many Mbed OS boards implement timers as part of peripherals. Mbed OS supports using SysTick or the peripheral timers as RTOS ticker.
Mbed OS uses SysTick as the default RTOS ticker, but if you want to use one of the peripheral timers as your RTOS ticker, you can override the default SysTick timer. For example, see Low Power Ticker on how to use an external low power timer to perform power efficient timing operations that only require millisecond accuracy.
Default timeouts
The Mbed RTOS API has made the choice of defaulting to 0 timeout (no wait) for the producer methods, and osWaitForever (infinite wait) for the consumer methods.
A typical scenario for a producer could be a peripheral triggering an interrupt to notify an event; in the corresponding interrupt service routine you cannot wait (this would deadlock the entire system). On the other side, the consumer could be a background thread waiting for events; in this case the desired default behavior is not using CPU cycles until this event is produced, hence the osWaitForever.
Note: When calling an RTOS object method in an ISR, all the timeout parameters must be set to 0 (no wait); waiting in ISR is not allowed.
The main() function
The function main is a special thread function that is started at system initialization and has the initial priority osPriorityNormal; it is the first thread the RTOS schedules.
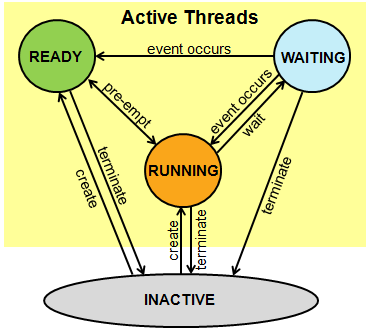
A Thread can be in the following states:
Running: The currently running thread. Only one thread at a time can be in this state.Ready: Threads that are ready to run. Once therunningthread has terminated or iswaiting, thereadythread with the highest priority becomes therunningthread.Waiting: Threads that are waiting for an event to occur.Inactive: Threads that are not created or terminated. These threads typically consume no system resources.
Signals
Each Thread can wait for signals and be notified of events:
/*
* Copyright (c) 2020 Arm Limited and affiliates.
* SPDX-License-Identifier: Apache-2.0
*/
#include "mbed.h"
Thread thread;
DigitalOut led(LED1);
void led_thread()
{
while (true) {
// Signal flags that are reported as event are automatically cleared.
ThisThread::flags_wait_any(0x1);
led = !led;
}
}
int main(void)
{
thread.start(callback(led_thread));
while (true) {
ThisThread::sleep_for(1000);
thread.flags_set(0x1);
}
}
Status and error codes
The Mbed OS error handling system assigns specific error codes for RTOS-related errors. See the error handling documentation for more information on RTOS errors reported.