Important changes to repositories hosted on mbed.com
Mbed hosted mercurial repositories are deprecated and are due to be permanently deleted in July 2026.
To keep a copy of this software download the repository Zip archive or clone locally using Mercurial.
It is also possible to export all your personal repositories from the account settings page.
Dependents: 2014-Mx64 2014-mx64-test
Fork of
AX12
by  Chris Styles
Chris Styles
You are viewing an older revision! See the latest version
Homepage
Memo
MX64 was different from AX12
1.in RAM Area MX64 have more date
26 (0x1A) D Gain Derivative Gain RW 0 (0x00) 27 (0x1B) I Gain Integral Gain RW 0(0x00) 28 (0x1C) P Gain Proportional Gain RW 32(0x20) 70 (0x46) Torque Control Mode トルク制御モード RW 0(0x00) 71 (0x47) Goal Torque(Low byte) 目標トルク値下位バイト RW 0(0x00) 72 (0x48) Goal Torque(High byte) 目標トルク値上位バイト RW 0(0x00) 73 (0x49) Goal Acceleration 目標加速度値 RW 0(0x00)
2.in Baud Rate AX12->0254 MX64->0252 Baudrate(BPS)=2000000 / (Date + 1)
3.MX64 use PID Controller .......i don't know...;(
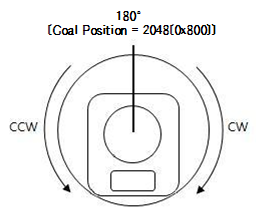
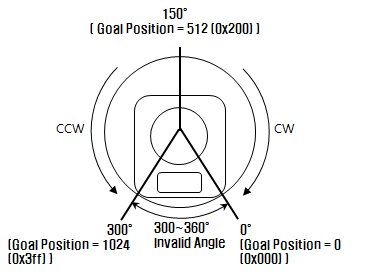
4.Goal Position
MX64: /media/uploads/ppr2013G2/rx28m_angle.png 04095(0x000xFFF) Unit is 0.088 degree
{kind=link}
AX12: /media/uploads/ppr2013G2/dx_series_goal.png 01023(0x000x3FF) Unit is 0.29 degree
{kind=link}
5.Torque Control Mode Torque Control Mode Enableが1になるとダイナミクセルは次のように行動します。 1. ダイナミクセルは位置及び速度制御をしません。 2. ダイナミクセルはGoal Torqueに書いてあるトルクで制御します。 3. Goal position及びGoal speedに値を書いても反応しません。 4. 位置及び速度制御が出来ないので車輪モードのように行動します。
Goal Torque 目指すトルク値です。 0 ~ 2047 (0x7FF) まで使用されて単位は 4.5mA です。 (トルクと電流値は正比例します。) 01023 範囲の値を使用するとCCW方向にトルクが加わって0に設定すると止めます。 1024 2047 範囲の値を使用するとCW方向にトルクが加わって1024に設定すると止めます。 つまり、10番目のbitが方向を制御するdirection bitに成ります。 Goal TorqueはTorque Limit(34,35)より大きくなれません。
Goal Acceleration 目標加速度値です。 0 ~ 254 (0XFE)まで使用され、単位は約8.583 Degree / sec^2 です。 0に設定すると加速度制御をしなくモーターの最大化速度で動くと言う意味です。 目標速度が0の場合も加速度制御をしなくモーターの最大加速度で動きます。 254を設定する場合、2180 Degree / sec^2 に成ります。 例え、ダイナミクセルの速度が現在0で、GOAL ACCELERATIONが10の場合、 1秒後のダイナミクセルの速度は14.3 RPMに成ります。