3軸デジタルジャイロ ITG-3200

InvenSenseのジャイロセンサITG-3200をmbedに接続します。
ストロベリーリナックスさんから購入(SparkFun)
http://www.sparkfun.com/commerce/product_info.php?products_id=9801
ADコンバータが内蔵されており、I2C接続で通信することができます。
ITG-3200をmbedのI2C端子に接続して、適当にプルアップ抵抗を接続します。
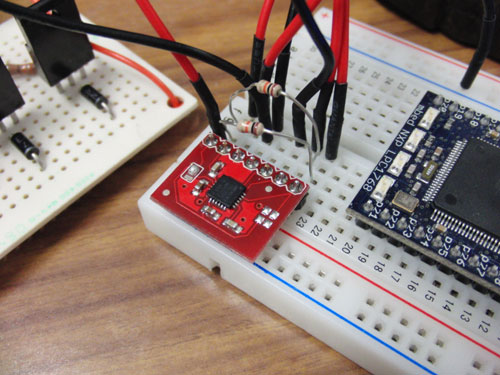
SparkFunにあるATmega328のサンプルプログラムを参考にして、mbed用のプログラムを作成。
注意しなきゃいけないのが、受け取った2バイトの値は、short intで受け取らなければいけないことです。
ジャイロセンサの値は8ビットを2回受け取って、16ビットとして、プラスとマイナスの値を表現するので、intだと32ビットで受け取ってしまいます。
あとはジャイロセンサのI2Cアドレスは7ビットですが、後ろに0を追加して無理やり8ビットにして指定してやらないとmbedの場合ダメです。
mbed program
#include "mbed.h"
I2C i2c(p9, p10); // sda, scl
Serial pc(USBTX, USBRX); // tx, rx
const int addr = 0xD2; // define the I2C Address
int main() {
i2c.frequency(400000); //set frequency to 400 KHz
pc.baud(115200);
char addr_y[1];
char read[8];
short int read_x_2byte=0;
short int read_y_2byte=0;
short int read_z_2byte=0;
short int tempr_2byte=0;
char PWR_M[2]={0x3E,0x80};
i2c.write(addr, PWR_M, 2); // Send command string
char SMPL[2]={0x15,0x00};
i2c.write(addr, SMPL, 2); // Send command string
char DLPF[2]={0x16,0x18};
i2c.write(addr, DLPF, 2); // Send command string
char INT_C[2]={0x17,0x05};
i2c.write(addr, INT_C, 2); // Send command string
char PWR_M2[2]={0x3E,0x00};
i2c.write(addr, PWR_M2, 2); // Send command string
wait(1);
while (1) {
addr_y[0] = 0x1B; // pointer to command register
i2c.write(addr, addr_y, 1); // Send command string
i2c.read(addr, read, 8); // read
tempr_2byte=(read[0] << 8) + read[1];
read_x_2byte=(read[2] << 8) + read[3];
read_y_2byte=(read[4] << 8) + read[5];
read_z_2byte=(read[6] << 8) + read[7];
pc.printf("%f, %d, %d, %d\n", ((double)tempr_2byte+13200.0)/280.0+35.0, read_x_2byte, read_y_2byte, read_z_2byte);
}
}
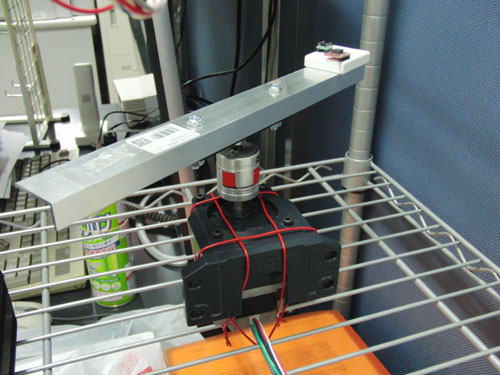
ジャイロセンサの実験を行いました。
ステッピングモータに下写真のような装置を取り付け、mbedで操作し、0.01秒のタイマーでI2Cから値を読み取ります。
オフセット値の平均を差し引きます。
得られた値を14.375で割ると角速度[deg/sec]が出ます。
それを台形積分法で積分すると、角度[deg]が算出できます。
モーターを15[deg/sec]で360度回転させたときのグラフが下の図です。
積分した値は374.46度になりました。
誤差は4%になりました。
思ったよりいい精度です。
0 comments
You need to log in to post a comment