IoT Window Blinds Controller
 Jack Hooper.
0
replies
Jack Hooper.
0
replies
Overview
Jonathan Hooper and Kevin Ferri
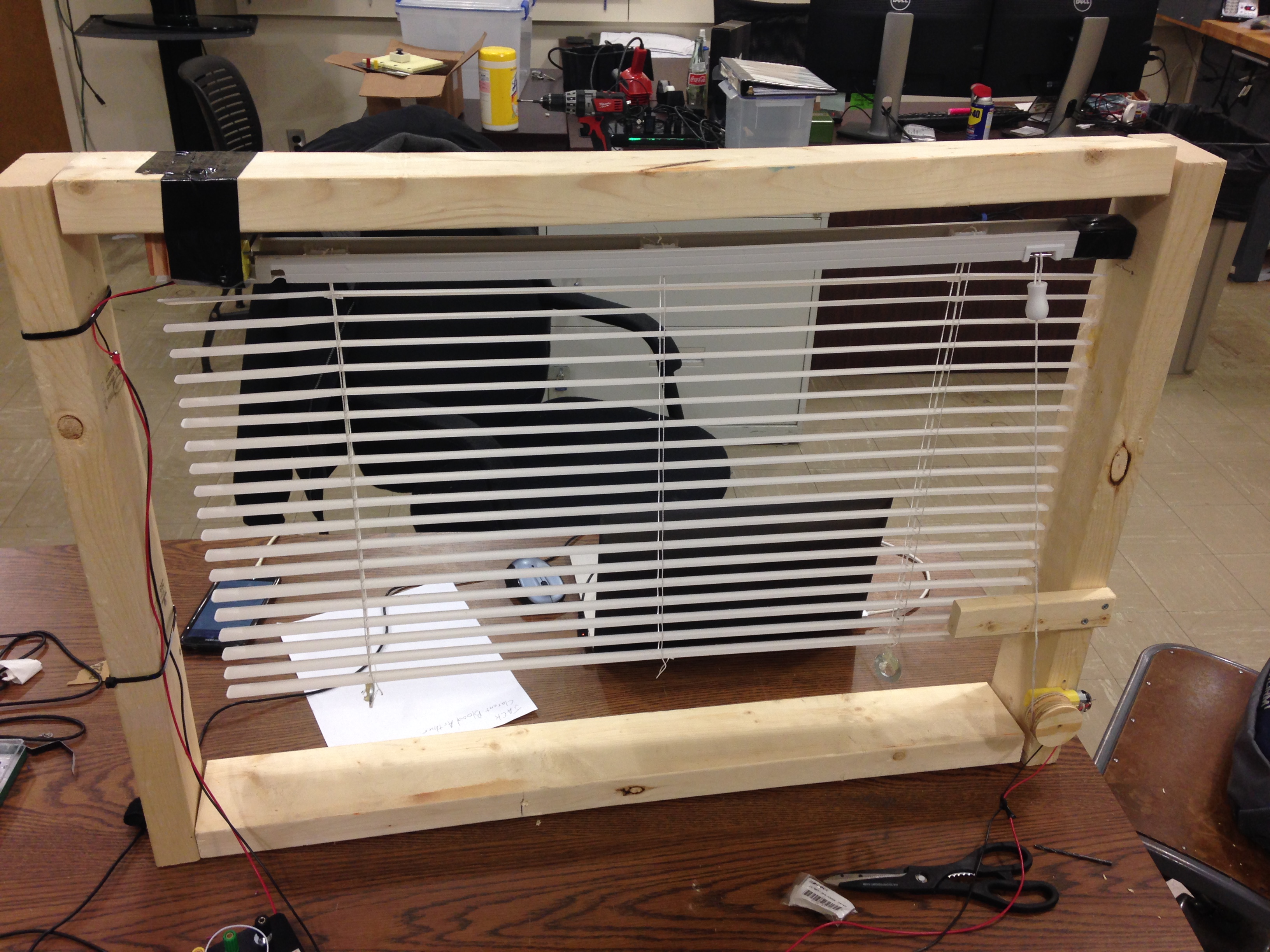
For our project, we made an Internet of Things-style window blinds controller. We developed an Android App, and used the Huzzah ESP8266 to connect to Wifi (hosted via a Windows 10 laptop). The App then connected to the mbed board using TCPSockets. It sends a collection of 5 characters, which are decoded and used by the mbed in the format of [OpCode][blank][+/-][0 or 1][0 through 9]. The mbed then uses a PWM Signal to control one of two motors for the tilt of the slats or the height of the blinds. The uLCD Screen was used to confirm the data the mbed was receiving correlated with what the app was sending. The App was used as the server while the mbed was the client.
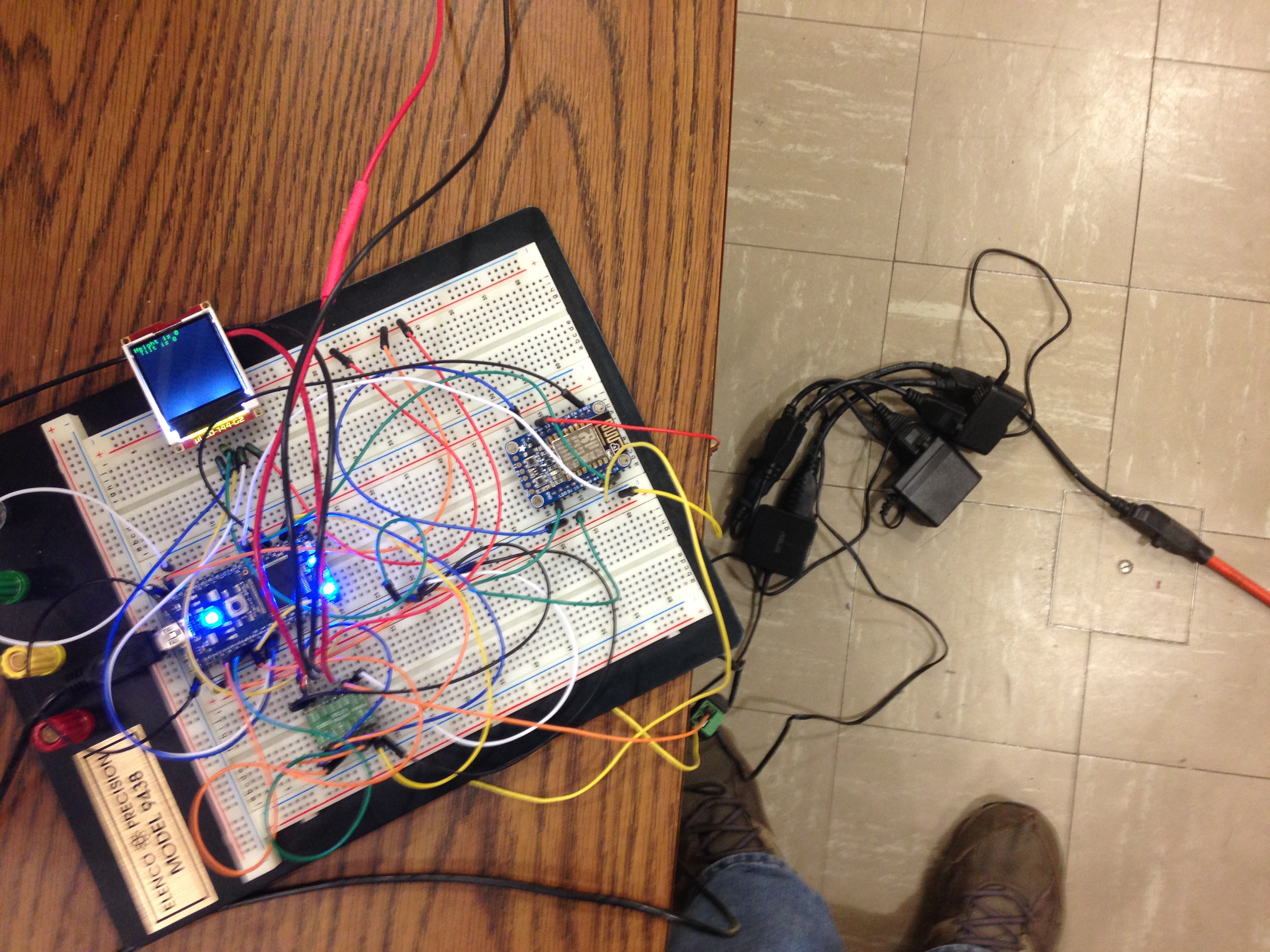
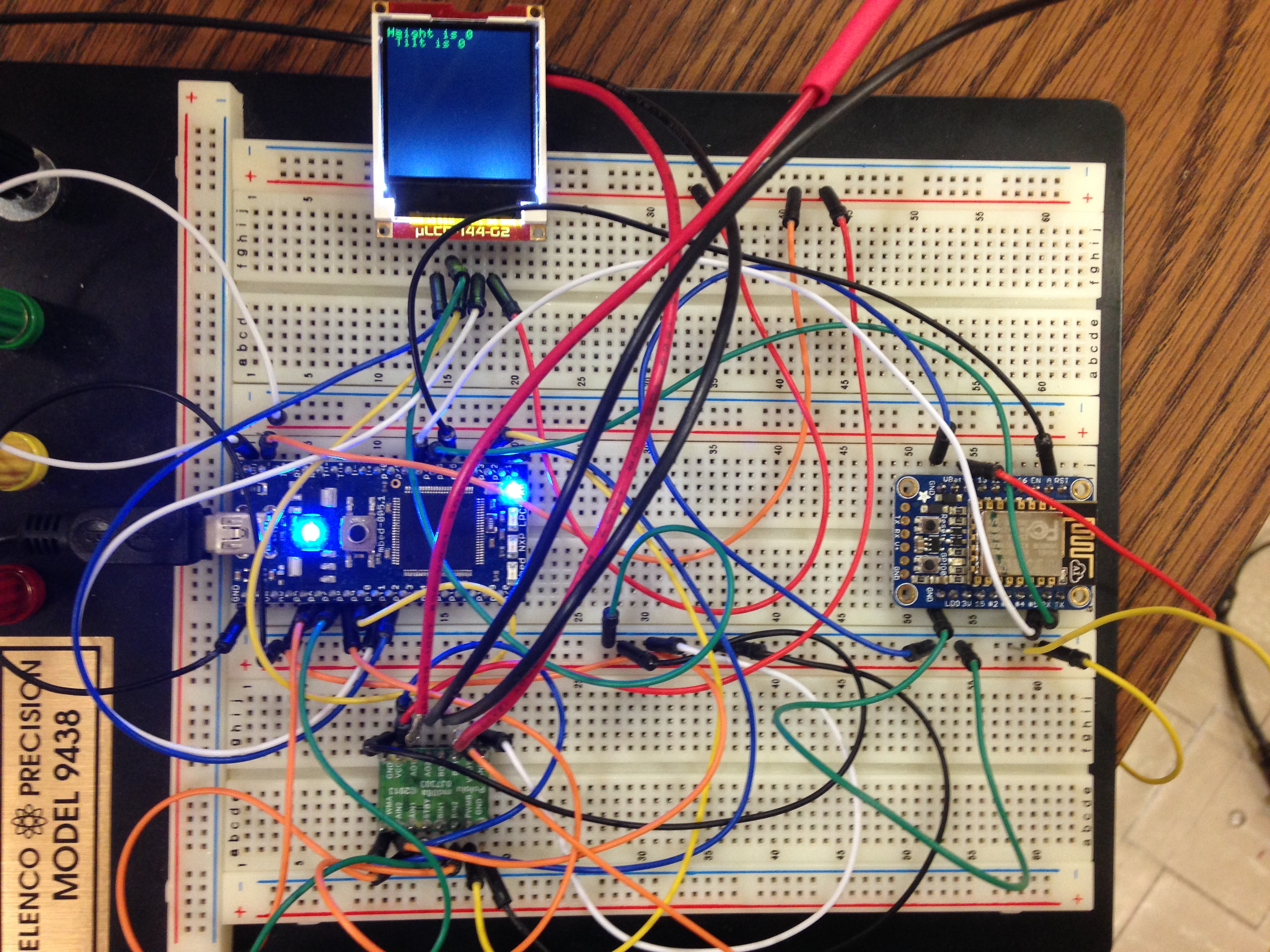

Components
- mbed LPC1768
- uLCD-144-G2 128 by 128 Smart Color LCD
- Adafruit HUZZAH ESP8266 Breakout

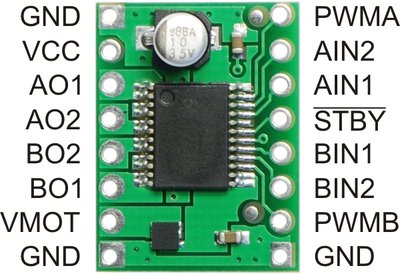
- TB6612FNG dual H-bridge motor driver
- MINI DC GearBox DG01D dual-axis drive gear motor

Wiring
| Mbed | Huzzah | |
|---|---|---|
| p26 | RST | |
| p27 | TX | |
| p28 | RX | |
| GND | GND | |
| V+ | External 5V Supply |
| Mbed | uLCD |
|---|---|
| p9 TX | RX |
| p10 RX | TX |
| p11 | Reset |
| Vu | 5V |
| GND | GND |
| Mbed | HBridge | Tilt Motor | Height Motor | |
|---|---|---|---|---|
| p22 | PWMA | |||
| p23 | PWMB | |||
| GND | GND | GND | ||
| Vmot | External 5V supply | |||
| 5V Vu | Vcc, !Stby | |||
| p5 | AIn2 | |||
| p6 | AIn1 | |||
| p7 | BIn1 | |||
| p8 | BIn2 | |||
| A01 | + | |||
| A02 | - | |||
| B01 | + | |||
| B02 | - |
mbed Program
Android App
/media/uploads/jhooper7/embeddedsystemsprojecti_-_copy.zip
Main.cpp
main.cpp
#include "mbed.h"
#include "TCPSocketConnection.h"
#include "ESP8266Interface.h"
#include "uLCD_4DGL.h"
#include "Motor.h"
ESP8266Interface wifi(p28, p27, p26);
TCPSocketConnection socket;
//Serial pc(USBTX, USBRX); //Used for testing functionality without wifi
Motor m1(p23, p5, p6); //pwm, fwd, rev //this one is for raising/lowering blinds
Motor m2(p24, p7, p8); //this one is for changing the tilt of them.
DigitalOut led1(LED1);
DigitalOut led2(LED2);
DigitalOut led3(LED3);
DigitalOut led4(LED4);
int heightpos=0;
int tiltpos=0;
float mspeed=1; //can be changed based on rate here;
char inData[5];
char previnData[5];
char inChar;
int index=0;
//Change these
const char* wifissid = "SSID";
const char* password = "PASS";
const char* ipaddress="IP";
const int port = PORT;
void closetiltup(){//sets front of blinds to be tilted up
while(tiltpos>-10){
m2.speed(-mspeed);
wait(mspeed*.02);
tiltpos=tiltpos-(mspeed);
}
m2.speed(0);
}
void closetiltdown(){
while(tiltpos<10){
m2.speed(mspeed);
wait(mspeed*.02);
tiltpos=tiltpos+(mspeed);
}
m2.speed(0);
}
void tiltto(float pos){
if(pos>tiltpos){
m2.speed(mspeed);
while(tiltpos<pos){
wait(mspeed*.02);
tiltpos=tiltpos+(mspeed);
}
m2.speed(0);
}
else if(pos<tiltpos){
m2.speed(-mspeed);
while(tiltpos>pos){
wait(mspeed*.02);
tiltpos=tiltpos-(mspeed);
}
m2.speed(0);
}
else{
}
}
void fullup(){
while(heightpos<10){
m1.speed(mspeed);
wait(mspeed*2);
heightpos=heightpos+(mspeed);
}
m1.speed(0);
}
void fulldown(){
while(heightpos>0){
m1.speed(-mspeed);
wait(mspeed);
heightpos=heightpos-(mspeed);
}
m1.speed(0);
}
void moveto(float pos){
if(pos>heightpos){
m1.speed(mspeed);
while(heightpos<pos){
wait(mspeed*1.3);
heightpos=heightpos+(mspeed);
}
m1.speed(0);
}
else if(pos<heightpos){
m1.speed(-mspeed);
while(heightpos>pos){
wait(mspeed*.08);
heightpos=heightpos-(mspeed);
}
m1.speed(0);
}
else{
}
}
void resettozero(){
moveto(0);
tiltto(0);
}
int main()
{
uLCD_4DGL ulcd(p9, p10, p11); // this is for an mbed-side print of current status
float num;
float prevnum;
int n;
wifi.init();
bool result;
result = wifi.connect(wifissid, password);
if(!result){
ulcd.printf("error");
while(!result){
result=wifi.connect(wifissid, password);
}
}
ulcd.printf("wifi c");
if(socket.connect(ipaddress, port)<0){
ulcd.printf("\ndevice nc");//hosted via laptop
while(socket.connect(ipaddress,port)<0){
}
}
ulcd.printf("\ndevice c");
//socket.send("1", 1);
while(1){
/* if(!wifi.is_connected()){
result = wifi.connect(wifissid, password);
if(!result){
ulcd.printf("error");
while(!result){
result=wifi.connect(wifissid, password);
}
}
}
while(wifi.is_connected()){*/
led1=!led1;
/* if(!socket.is_connected()){
while(socket.connect(ipaddress,port)<0){
led2=!led2;
}
}*/
n=0;
socket.send("1",1);
// socket.close();
//while(socket.connect(ipaddress,port)<0){
led2=!led2;
// }
n=socket.receive(inData, sizeof(inData));
led3=!led3;
ulcd.cls();
// ulcd.printf("\n%c%c%c%c%c", inData[0], inData[1], inData[2], inData[3], inData[4]);
prevnum=num;
num = ((inData[3]-48)*10)+(inData[4]-48);
// ulcd.printf("\n%f", num);
if(inData[2]=='-')
num=-num;
if((num>10)or(num<-10))
num=prevnum; //do nothing if invalid input
index=0;
if(inData[0]=='0')
resettozero();
else if(inData[0]=='1')
closetiltup();
else if(inData[0]=='2')
closetiltdown();
else if(inData[0]=='3')
tiltto(num);
else if(inData[0]=='4')
fullup();
else if(inData[0]=='5')
fulldown();
else if(inData[0]=='6'){
if(num>=0)
moveto(num);
}
ulcd.locate(0,0);
ulcd.printf("Height is %i\n Tilt is %i\n", heightpos, tiltpos);
//if(n>-1){
socket.close();
// if(!socket.is_connected()){
// ulcd.printf("\ndevice nc");//hosted via laptop
while(socket.connect(ipaddress,port)<0){
led4=!led4;
}
ulcd.printf("\ndevice rc");
//}
//}
}//}
socket.close();
wifi.disconnect();
}
Please log in to post comments.