PROCESADORES - 2016-03. TAREA 1. PID+ANDROID+BLUETOOTH
Dependencies: DebouncedIn QEI TextLCD mbed
Fork of
PID_ENCODER_OK
by  Gustavo Ramirez
Gustavo Ramirez
Tarea 1: PID + Android + Bluetooth
PROCESADORES - 2016-03
Por:
- Jaime Alonso Osorio Palacio
- David Fuertes Chaguezac
- Wilson Anibal Ortega Andrade
- John Wilmer Ruiz López
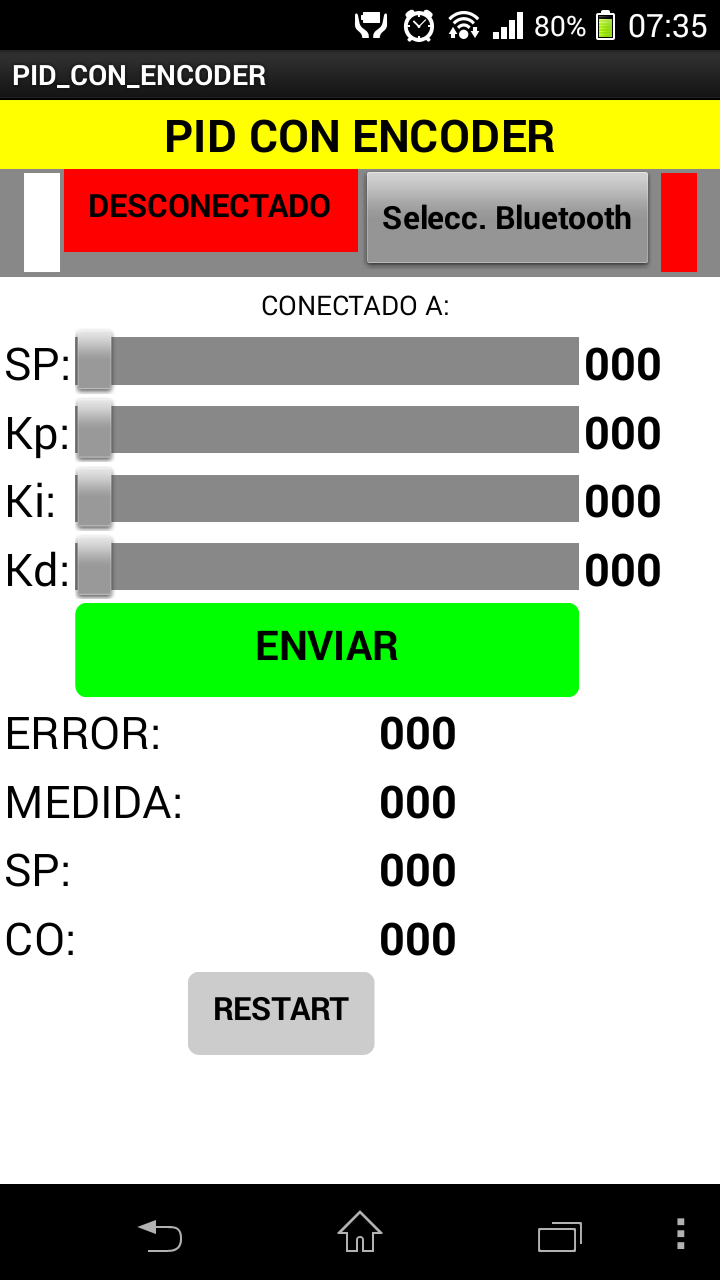
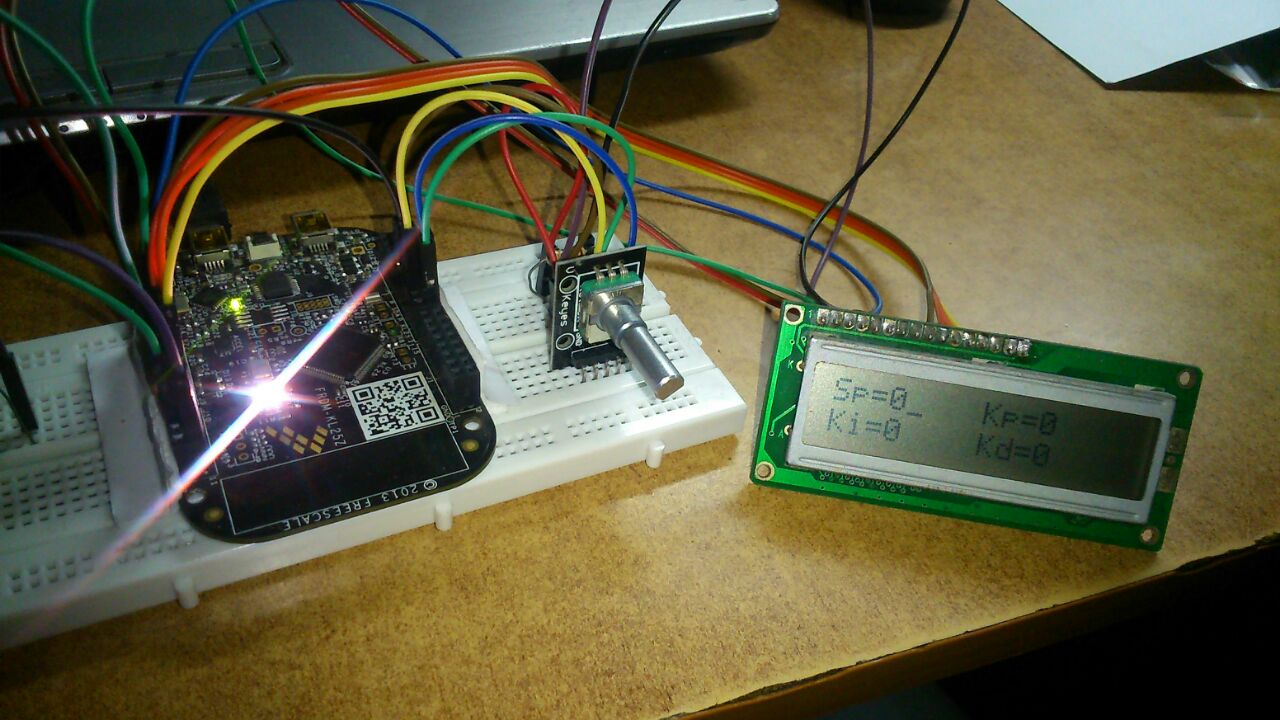
Recibe por medio de un módulo Bluetooth HC-05 ZS-040 desde un dispositivo Android los parámetros SP, KP, KI y KD. Crea un PID que se prueba sobre una planta de primer orden RC conformado por una resistencia R=11kOhm y un capacitor C=22uF cuya salida y realimentación se conectan por los puertos analógicos determinados en la FRDM KL25Z. Para más información:
- https://developer.mbed.org/users/tony63/code/PID_ENCODER_OK/
Reenvía continuamente el error, la medida, el SP y la acción de control hacia el dispositivo Android. Estos también son mostrados en una LCD 16x2.
Posee depuración via USB en una terminal (se usó Termite 3.2.) para conocer los estados en los que se encuentra el programa y verificar los datos.
La aplicación para Android se realizó en APP Inventor y se puede descargar en:
- https://www.dropbox.com/s/gfhh003rq3nknmp/PID_ANDRIOD_ENTEROS.aia?dl=0
IMÁGENES:
main.cpp
- Committer:
- jaosoriop
- Date:
- 2016-11-05
- Revision:
- 2:278af91e46ff
- Parent:
- 1:058b8f5c135d
File content as of revision 2:278af91e46ff:
#include "mbed.h"
#include "QEI.h" // Librería del ENCODER GIRATORIO("potenciómetro"+PULSADOR)
#include "TextLCD.h" // LCD
#include "DebouncedIn.h"
#include "stdio.h" //printf, etc
#include "string.h"
#include "stdlib.h" // atoi
#include "stdint.h"
#include <assert.h>
TextLCD lcd(PTB10, PTB11, PTE2, PTE3, PTE4, PTE5); // rs, e, d4-d7
QEI encoder (PTA13, PTD5, NC, 624);
AnalogIn y(PTB3); //entrada analoga
AnalogOut u(PTE30); //salida analoga (Imax=1,5mA!!!!)
DigitalOut LedVerde(LED2);
DigitalOut LedRojo(LED1);
DigitalOut LedAzul(LED3);
DigitalIn button4(PTC17);//termina y consolida valores de 4 parametros y sale del loop
//****************** CONFIGURACIÓN DE PUERTOS DE COMUNICACIÓN ******************
Serial BLUETOOTH(PTE0,PTE1); //puertos USART del FRDM para el módulo BLUETOOTH
Serial pc(USBTX,USBRX);
//********************************** VARIABLES *********************************
int cambio=0, diferencia=0;
float pid,o,ai,ad,ap,med,err;
float err_v;
int spnum=0,kinum=0,kpnum=0,kdnum=0,pos=1;
int i,ret;
int n=0;
char *ptr;
char bufferllegada[100];
char bufferenvio[100];
Timer t;
//********************************** FUNCIONES *********************************
//*********************** LECTURA BUFFER - INTERRUPCIONES **********************
int readBuffer(char *buffer,int count){
int i=0;
t.start(); // start timer
while(1) {
while (BLUETOOTH.readable()) {
char c = BLUETOOTH.getc();
if (c == '\r' || c == '\n') c = '\0';
buffer[i++] = c;
if(i > count)break;
}
if(i > count)break;
if(t.read() > 1) {
t.stop();
t.reset();
break;
}
}
wait(0.5);
while(BLUETOOTH.readable()) {
char c = BLUETOOTH.getc();
}
return 0;
}
//****************************** BORRADO DE BUFFER *****************************
void cleanBuffer(char *buffer, int count){
for(int i=0; i < count; i++) {
buffer[i] = '\0';
}
}
//******************** SPLIT A STRING BY PARSING STRINGS BY ; ******************
int dtmsplit(char *str, const char *delim, char ***array, int *length ) {
int i=0;
char *token;
char **res = (char **) malloc(0 * sizeof(char *));
/* get the first token */
token = strtok(str, delim);
while( token != NULL )
{
res = (char **) realloc(res, (i + 1) * sizeof(char *));
res[i] = token;
i++;
token = strtok(NULL, delim);
}
*array = res;
*length = i;
return 1;
}
//******************************************************************************
//******************************* CICLO PRINCIPAL ******************************
//******************************************************************************
int main()
{
//***************************** BAUDIOS Y BITS *****************************
BLUETOOTH.baud(9600);
BLUETOOTH.format(8,Serial::None,1);
lcd.locate(0,1);
lcd.printf("**Control PID**");
pc.printf("**Control PID**\r\n");
wait(2);
lcd.cls(); // Borrar Pantalla
lcd.locate(0,0);
lcd.printf("Esperando datos...");
pc.printf("Esperando datos...\r\n");
while(1){
if (BLUETOOTH.readable()) {
readBuffer(bufferllegada,100);
if(NULL != ( ptr = strstr(bufferllegada,"SP"))){
printf("Buffer original = [%s] \n\n", bufferllegada);
//******************** PARTIENDO LA CADENA *********************
int i;
char **arr = NULL;
int count =0;
int c = dtmsplit(bufferllegada, ";", &arr, &count);
pc.printf("Found %d tokens.\n", count);
for (i = 0; i < count; i++){
pc.printf("string #%d: %s\n", i, arr[i]);
}
pc.printf("SP-string=%s\n",arr[1]);
pc.printf("KP-string=%s\n",arr[3]);
pc.printf("KI-string=%s\n",arr[5]);
pc.printf("KD-string=%s\n",arr[7]);
pc.printf("\n");
spnum=atoi(arr[1]); //atoi -> Convert string to integer C++
kpnum=atoi(arr[3]);
kinum=atoi(arr[5]);
kdnum=atoi(arr[7]);
pc.printf("SP=%i\n",spnum);
pc.printf("KP=%i\n",kpnum);
pc.printf("KI=%i\n",kinum);
pc.printf("KD=%i\n",kdnum);
pc.printf("\n");
free(arr);
} //end if(NULL != ( ptr1 = strstr(buffer,"SP"))){
// My code (tested) in http://stackoverflow.com/questions/9210528/split-string-with-delimiters-in-c
// http://stackoverflow.com/questions/9054553/atoi-from-string-to-integer-using-char-pointer
// https://www.tutorialspoint.com/cprogramming/c_pointers.htm
// Impresión de cada parámetros en LCD
lcd.cls(); // Borrar Pantalla
// Imprime SP
lcd.locate(0,0);
lcd.printf("Sp=%d",spnum);
lcd.locate(3,0); // necesariamente (columna, fila)
lcd.printf(" ");
lcd.locate(3,0);
lcd.printf("%d", spnum);
// Imprime KP
lcd.locate(8,0);
lcd.printf("Kp=%d",kpnum);
lcd.locate(11,0);
lcd.printf(" ");
lcd.locate(11,0);
lcd.printf("%d", kpnum);
// Imprime KI
lcd.locate(0,1);
lcd.printf("Ki=%d",kinum);
lcd.locate(3,1);
lcd.printf(" ");
lcd.locate(3,1);
lcd.printf("%d", kinum);
// Imprime KD
lcd.locate(8,1);
lcd.printf("Kd=%d",kdnum);
lcd.locate(11,1);
lcd.printf(" ");
lcd.locate(11,1);
lcd.printf("%d", kdnum);
} //Fin if (BLUETOOTH.readable()) {
if (!button4){
wait(0.1);
break; //sale del bucle si pisan suiche4
}
} // FIN while(1)
//Transicion
lcd.cls(); //borra la pantalla
lcd.printf(" GUARDADOS!");
pc.printf(" GUARDADOS!\r\n");
wait(1);
lcd.cls();
lcd.printf(" INICIA EL PID");
pc.printf(" INICIA EL PID\r\n");
wait(1);
// se imprimen los parches del control *****************************************
lcd.cls();
lcd.printf("Er=%3.0f",err);
lcd.locate(8,0);
lcd.printf("Me=%3.0f",med);
lcd.locate(0,1);
lcd.printf("Sp=%3.0f",spnum);
lcd.locate(8,1);
lcd.printf("Co=%3.0f",pid);
wait(1);
// CICLO PRINCIPAL CONTROLADOR PID
while(1){
med = y.read()*999;
err = (spnum-med); //se calcula el error
ap = kpnum*err*0.01f; //se calcula la accion proporcinal
ai =(kinum*err*0.01f)+ai; //calculo de la integral del error
ad = kdnum*(err-err_v)*0.01f; //calculo de la accion derivativa
pid = (ap+ai+ad);
// se verifica que pid sea positivo **************************************
if(pid<=0){
pid=0;
}
// se verifica que pid sea menor o igual la valor maximo *****************
if (pid > 999){
pid=999;
}
//se muestran las variables******************************************
lcd.locate(3,0);
lcd.printf(" ");
lcd.locate(3,0);
lcd.printf("%3.0f",err);
lcd.locate(11,0);
lcd.printf(" ");
lcd.locate(11,0);
lcd.printf("%3.0f",med);
lcd.locate(3,1);
lcd.printf(" ");
lcd.locate(3,1);
lcd.printf("%d",spnum);
lcd.locate(11,1);
lcd.printf(" ");
lcd.locate(11,1);
lcd.printf("%3.0f",pid);
/*
pc.printf("Er=%3.0f\r\n",err);
pc.printf("Me=%3.0f\r\n",med);
pc.printf("Sp=%3.0f\r\n",spnum);
pc.printf("Co=%3.0f\r\n",pid);
*/
//Normalizacion de la salida
// se actualizan las variables *******************************************
// se envia el valor pid a puerto analogico de salida (D/A) **************
err_v = err;
o = pid/999;
u.write(o);
// se repite el ciclo
wait_ms(30);
//****************** CONCATENA Y ENVÍA POR BLUETOOTH *******************
cleanBuffer(bufferllegada,100);
cleanBuffer(bufferenvio,100);
char str1[]="SEND";
char buf1[10];
char buf2[10];
char buf3[10];
char buf4[10];
sprintf(buf1,"%3.0f",err);
sprintf(buf2,"%3.0f",med);
sprintf(buf3,"%i",spnum);
sprintf(buf4,"%3.0f",pid);
strcpy (bufferenvio,str1);
strcat (bufferenvio,";");
strcat (bufferenvio,buf1);
strcat (bufferenvio,";");
strcat (bufferenvio,buf2);
strcat (bufferenvio,";");
strcat (bufferenvio,buf3);
strcat (bufferenvio,";");
strcat (bufferenvio,buf4);
strcat (bufferenvio,";");
pc.printf("Datos a enviar= %s\r\n",bufferenvio);
BLUETOOTH.printf("%s\r\n", bufferenvio);
// se envía algo del tipo SEND;XXX.XX;XXX.XX;XXX;XXX.XX
// al usar SPLIT por ; se tienen 5 elementos
}
}