You are viewing an older revision! See the latest version
Hover Vehicle Project Summary
This is an overview of a hoverboard that can change speed, change direction, avoid collision, and has other audio and visual features as shown in the demo and images below.
The movement of the hovercraft is controlled using two brushless DC motors and one servo motor. The brushless DC motor at the bottom is connected to a propeller to lift it up from the ground and make it hover. The brushless DC motor at the back is connected to another propeller that propels it forward. A servo attached to the bottom of the back fin rotates the fin left and right in order to change the direction of the hovercraft. A breadboard with the mbed and IO devices and sensors is attached to the front of the hovercraft as shown in the second picture. The motors are also connected to a battery pack inside the body of the hovercraft. The body is made of foil tray to keep it light and easy to hover.


Video demo of the hoverboard:
Presentation going over the working and other details of the hoverboard project:
Hardware required:¶
- Mbed
- Leds
- Speaker + 2N3904 amplifier transistor
- SD card + microSD Transflash Breakout reader chip
- 9 axis IMU chip LSM9DS0
- Brushless DC motor DG01D-A130 (2)
- Servo motor HS-322HD
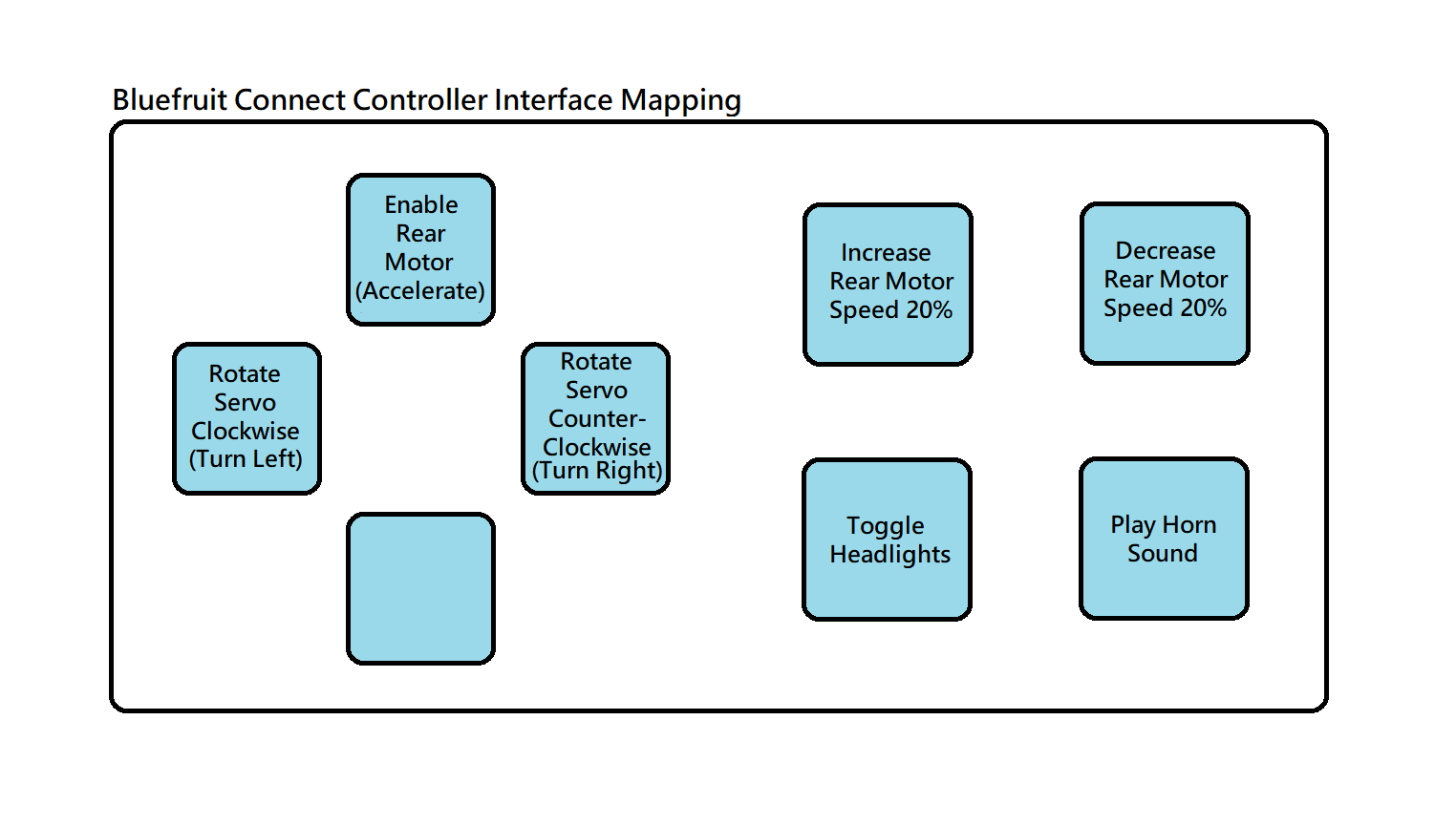
- Adafruit Bluefruit LE bluetooth chip
- Foil tray for the body
- Tarp for skirt
- Battery pack+barrel jack
- Propeller (2)