PCA9629 Stepper motor controller
An interface for controlling the PCA9629 (Stepper motor controller). The PCA9629 generates pulses for the stepper motor with its register setting. This library provides API for those registers.
Hello World
Import programPCA9629_Hello
Sample code for PCA9629 operation
Last commit 23 Jul 2012 by  InetrfaceProducts NXP
InetrfaceProducts NXP
Library
Import libraryPCA9629
PCA9629 a stepper motor controller class library
Last commit 23 Jul 2012 by InetrfaceProducts NXP
Pinout
Datasheet
http://www.nxp.com/documents/data_sheet/PCA9629.pdfNotes

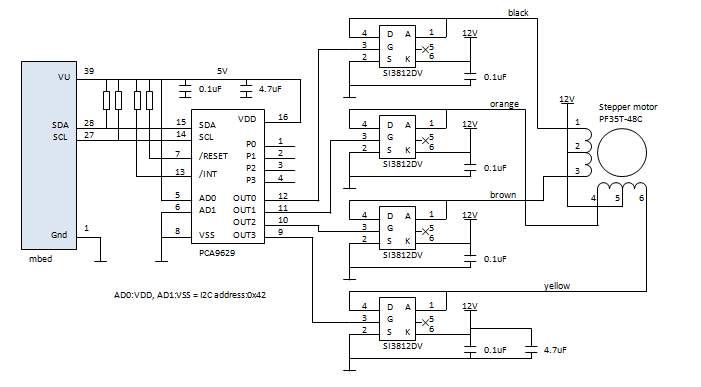
PCA9629 (x5) demo board: PCA9629, 4x FETs and stepper motor

Communicate with mbed through I2C. The motor can be operated by register settings
The PCA9629 is an I2C-bus controlled low-power CMOS device that provides all the logic and control required to drive a four phase stepper motor. PCA9629 is intended to be used with external high current drivers to drive the motor coils. The PCA9629 supports three stepper motor drive formats: one-phase (wave drive), two-phase, and half-step. In addition, when used as inputs, four General Purpose Input/Outputs (GPIOs) allow sensing of logic level output from optical interrupter modules and generate active LOW interrupt signal on the INT pin of PCA9629. This is a useful feature in sensing home position of motor shaft or reference for step pulses. Upon interrupt, the PCA9629 can be programmed to automatically stop the motor or reverse the direction of rotation of motor.
Output wave train is programmable using control registers. The control registers are programmed via the I2C-bus. Features built into the PCA9629 provide highly flexible control of stepper motor, off-load bus master/micro and significantly reduce I2C-bus traffic. These include control of step size, number of steps per single command, number of full rotations and direction of rotation. A ramp-up on start and/or ramp-down on stop is also provided.

Waveforms: Lower 2 lines are I2C bus. Upper 4 lines are output for motor driver stage
Motor moving 16 steps with acceleration and deceleration after register setting via I2C
Demo video of "Hello world" program
You need to log in to post a discussion

Tested boards
